正在加载图片...
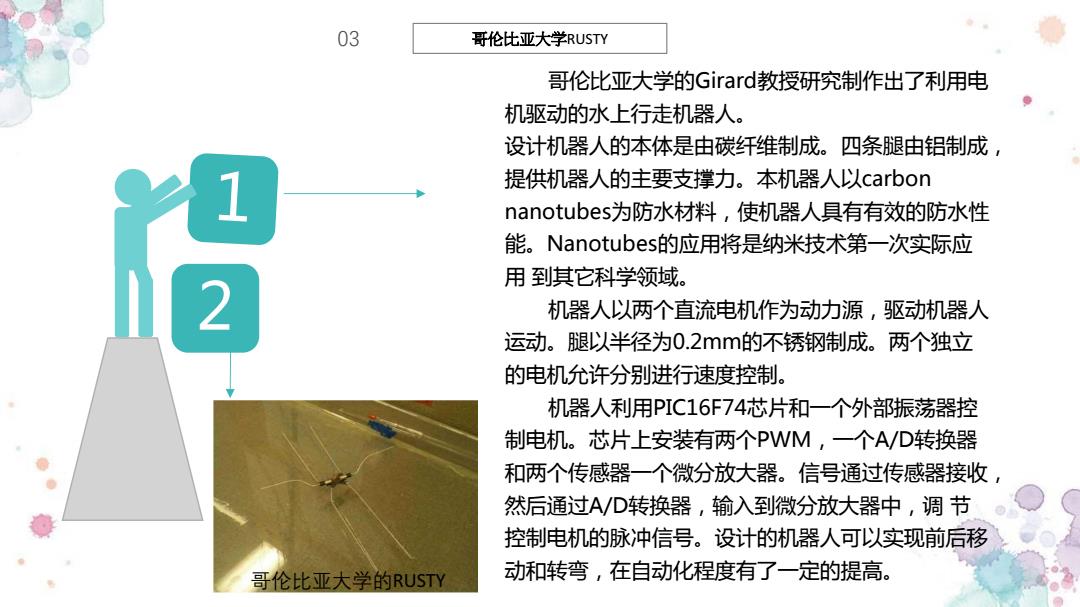
03 哥伦比亚大学RUSTY 哥伦比亚大学的Girard教授研究制作出了利用电 机驱动的水上行走机器人。 设计机器人的本体是由碳维制成。四条腿由铝制成, 1 提供机器人的主要支撑力。本机器人以carbon nanotubesi为防水材料,使机器人具有有效的防水性 能。Nanotubes的应用将是纳米技术第一次实际应 用到其它科学领域。 机器人以两个直流电机作为动力源,驱动机器人 运动。腿以半径为0.2mm的不锈钢制成。两个独立 的电机允许分别进行速度控制。 机器人利用PIC16F74芯片和一个外部振荡器控 制电机。芯片上安装有两个PWM,一个A/D转换器 和两个传感器一个微分放大器。信号通过传感器接收 然后通过A/D转换器,输入到微分放大器中,调节 控制电机的脉冲信号。设计的机器人可以实现前后移 哥伦比亚大学的RUSTY 动和转弯,在自动化程度有了一定的提高。哥伦比亚大学RUSTY 哥伦比亚大学的Girard教授研究制作出了利用电 机驱动的水上行走机器人。 设计机器人的本体是由碳纤维制成。四条腿由铝制成, 提供机器人的主要支撑力。本机器人以carbon nanotubes为防水材料,使机器人具有有效的防水性 能。Nanotubes的应用将是纳米技术第一次实际应 用 到其它科学领域。 机器人以两个直流电机作为动力源,驱动机器人 运动。腿以半径为0.2mm的不锈钢制成。两个独立 的电机允许分别进行速度控制。 机器人利用PIC16F74芯片和一个外部振荡器控 制电机。芯片上安装有两个PWM,一个A/D转换器 和两个传感器一个微分放大器。信号通过传感器接收, 然后通过A/D转换器,输入到微分放大器中,调 节 控制电机的脉冲信号。设计的机器人可以实现前后移 动和转弯,在自动化程度有了一定的提高。 1 2 03 哥伦比亚大学的RUSTY