正在加载图片...
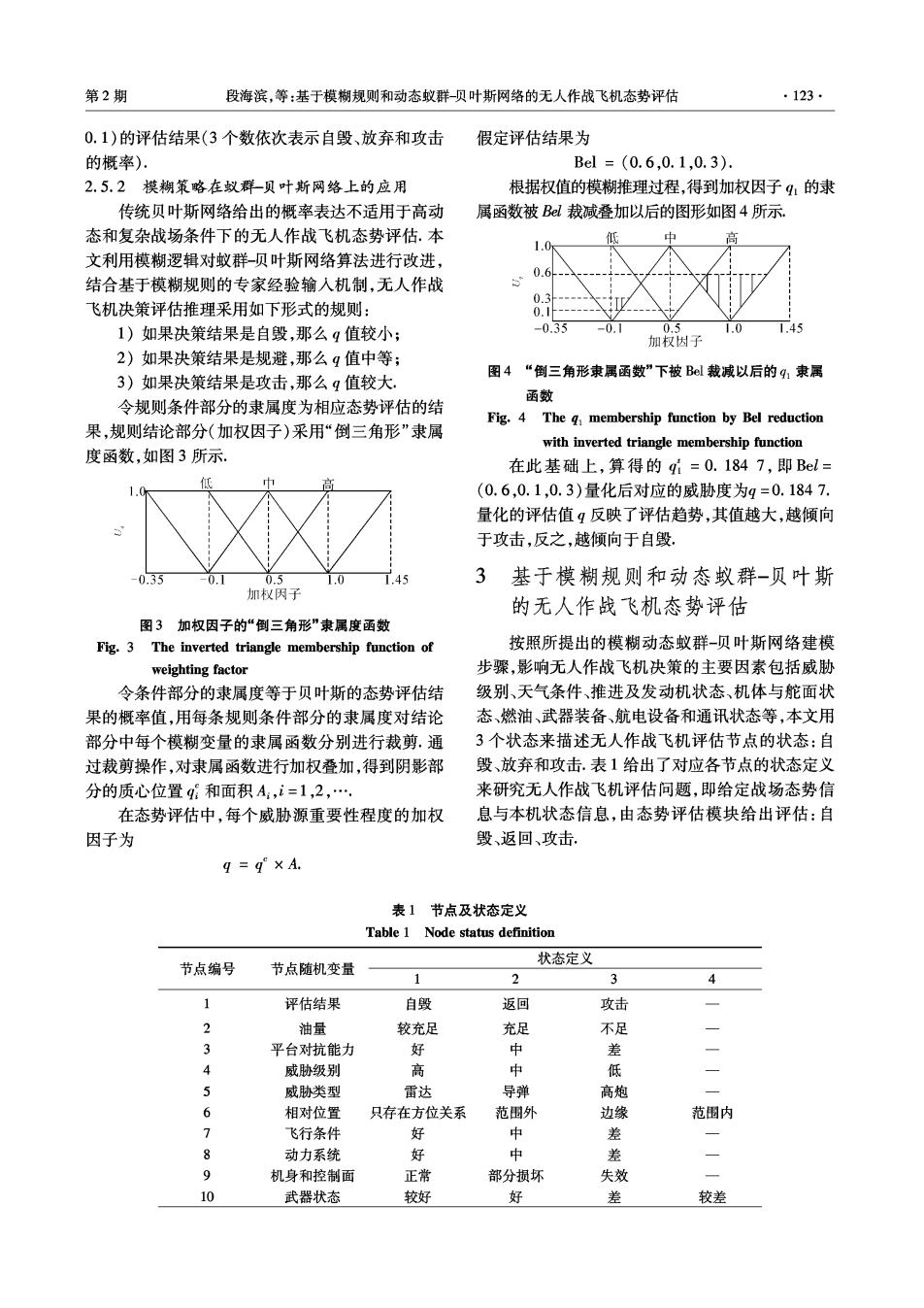
第2期 段海滨,等:基于模糊规则和动态蚁群-贝叶斯网络的无人作战飞机态势评估 ·123· 0.1)的评估结果(3个数依次表示自毁、放弃和攻击 假定评估结果为 的概率). Bel=(0.6,0.1,0.3) 2.5.2模糊策略在蚁群贝叶斯网络上的应用 根据权值的模糊推理过程,得到加权因子q,的隶 传统贝叶斯网络给出的概率表达不适用于高动 属函数被Bl裁减叠加以后的图形如图4所示. 态和复杂战场条件下的无人作战飞机态势评估.本 低 中 高 1.0 文利用模糊逻辑对蚁群-贝叶斯网络算法进行改进, 0.6 结合基于模糊规则的专家经验输入机制,无人作战 飞机决策评估推理采用如下形式的规则: 1)如果决策结果是自毁,那么9值较小; -0.35 0.5 1.0 1.45 加权因子 2)如果决策结果是规避,那么q值中等; 图4“倒三角形隶属函数”下被Bel裁减以后的9:隶属 3)如果决策结果是攻击,那么q值较大, 函数 令规则条件部分的隶属度为相应态势评估的结 Fig.4 The q membership function by Bel reduction 果,规则结论部分(加权因子)采用“倒三角形”隶属 with inverted triangle membership function 度函数,如图3所示 在此基础上,算得的gi=0.1847,即Bel= 低 (0.6,0.1,0.3)量化后对应的威胁度为q=0.1847. 量化的评估值q反映了评估趋势,其值越大,越倾向 于攻击,反之,越倾向于自毁。 035 0 0.5 3基于模糊规则和动态蚁群-贝叶斯 加权因子 的无人作战飞机态势评估 图3加权因子的“倒三角形”隶属度函数 Fig.3 The inverted triangle membership function of 按照所提出的模糊动态蚁群-贝叶斯网络建模 weighting factor 步骤,影响无人作战飞机决策的主要因素包括威胁 令条件部分的隶属度等于贝叶斯的态势评估结 级别、天气条件、推进及发动机状态、机体与舵面状 果的概率值,用每条规则条件部分的隶属度对结论 态、燃油、武器装备、航电设备和通讯状态等,本文用 部分中每个模糊变量的隶属函数分别进行裁剪,通 3个状态来描述无人作战飞机评估节点的状态:自 过裁剪操作,对隶属函数进行加权叠加,得到阴影部 毁、放弃和攻击.表1给出了对应各节点的状态定义 分的质心位置g和面积A:,i=1,2,…, 来研究无人作战飞机评估问题,即给定战场态势信 在态势评估中,每个威胁源重要性程度的加权 息与本机状态信息,由态势评估模块给出评估:自 因子为 毁、返回、攻击. 9=q×A. 表1节点及状态定义 Table 1 Node status definition 状态定义 节点编号 节点随机变量 1 2 3 4 评估结果 自毁 返回 攻击 2 油量 较充足 充足 不足 平台对抗能力 好 差 威胁级别 高 中 低 5 威胁类型 雷达 导弹 高炮 6 相对位置 只存在方位关系 范围外 边缘 范围内 飞行条件 中 差 8 动力系统 好 中 差 9 机身和控制面 正常 部分损坏 失效 10 武器状态 较好 好 差 较差