正在加载图片...
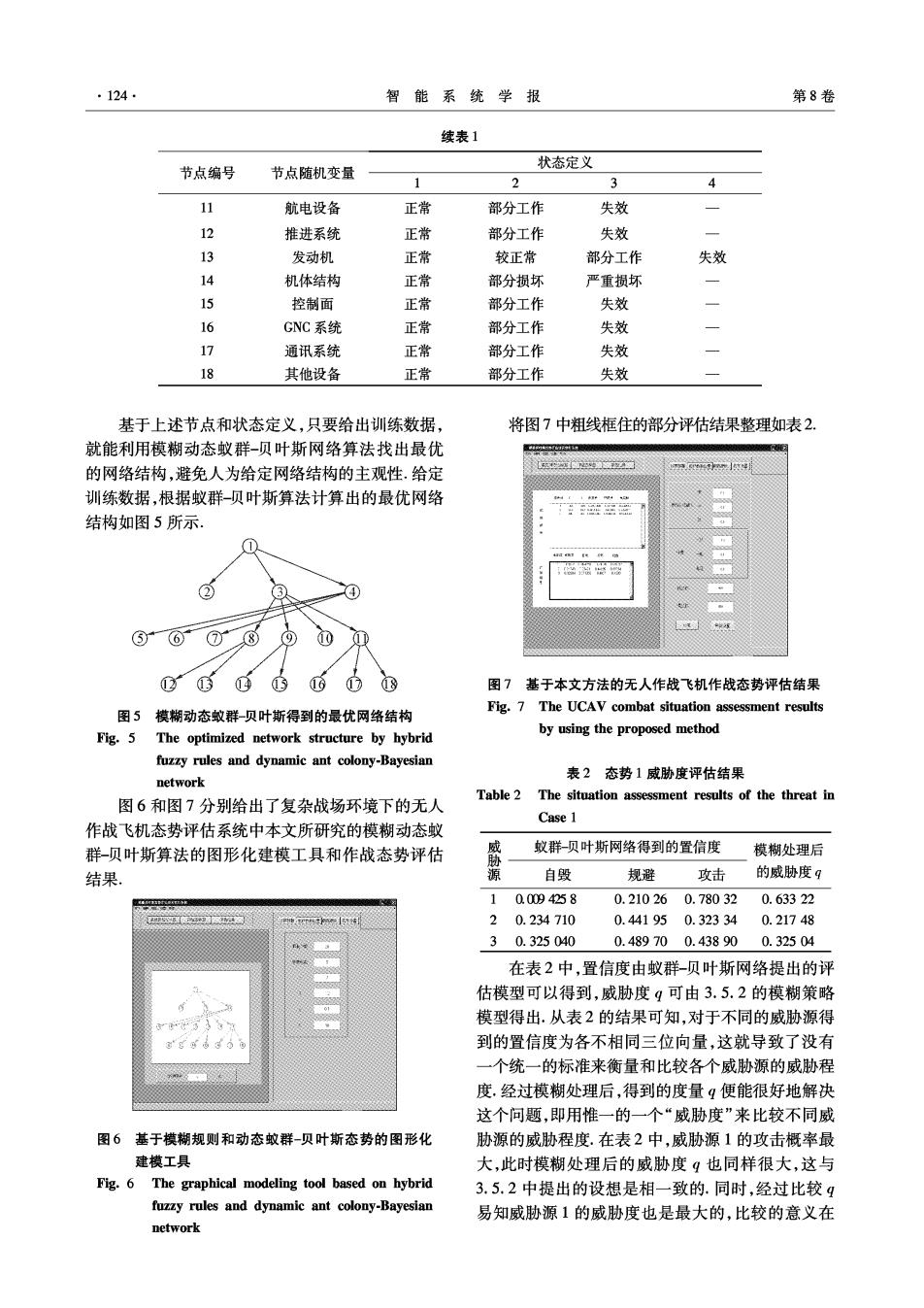
·124 智能系统学报 第8卷 续表1 状态定义 节点编号 节点随机变量 1 2 3 4 11 航电设备 正常 部分工作 失效 12 推进系统 正常 部分工作 失效 13 发动机 正常 较正常 部分工作 失效 14 机体结构 正常 部分损坏 严重损坏 15 控制面 正常 部分工作 失效 16 GNC系统 正常 部分工作 失效 17 通讯系统 正常 部分工作 失效 18 其他设备 正常 部分工作 失效 基于上述节点和状态定义,只要给出训练数据, 将图7中粗线框住的部分评估结果整理如表2。 就能利用模糊动态蚁群-贝叶斯网络算法找出最优 [ 的网络结构,避免人为给定网络结构的主观性.给定 训练数据,根据蚁群-贝叶斯算法计算出的最优网络 日密密 结构如图5所示 ;温 ② ⑤⑥ ⑦⑧ 正 18 图7基于本文方法的无人作战飞机作战态势评估结果 图5模糊动态蚊群-贝叶斯得到的最优网络结构 Fig.7 The UCAV combat situation assessment results Fig.5 The optimized network structure by hybrid by using the proposed method fuzzy rules and dynamic ant colony-Bayesian 表2态势1威胁度评估结果 network Table 2 The situation assessment results of the threat in 图6和图7分别给出了复杂战场环境下的无人 Case 1 作战飞机态势评估系统中本文所研究的模糊动态蚁 群-贝叶斯算法的图形化建模工具和作战态势评估 威 蚁群贝叶斯网络得到的置信度 模糊处理后 结果。 源 自毁 规避 攻击 的威胁度q 10.0094258 0.210260.780320.63322 20.234710 0.441950.323340.21748 30.325040 0.489700.438900.32504 在表2中,置信度由蚁群-贝叶斯网络提出的评 估模型可以得到,威胁度q可由3.5.2的模糊策略 模型得出.从表2的结果可知,对于不同的威胁源得 g 到的置信度为各不相同三位向量,这就导致了没有 一个统一的标准来衡量和比较各个威胁源的威胁程 度.经过模糊处理后,得到的度量q便能很好地解决 这个问题,即用惟一的一个“威胁度”来比较不同威 图6基于模糊规则和动态蚊群-贝叶斯态势的图形化 胁源的威胁程度.在表2中,威胁源1的攻击概率最 建模工具 大,此时模糊处理后的威胁度q也同样很大,这与 Fig.6 The graphical modeling tool based on hybrid 3.5.2中提出的设想是相一致的.同时,经过比较q fuzzy rules and dynamic ant colony-Bayesian 易知威胁源1的威胁度也是最大的,比较的意义在 network