正在加载图片...
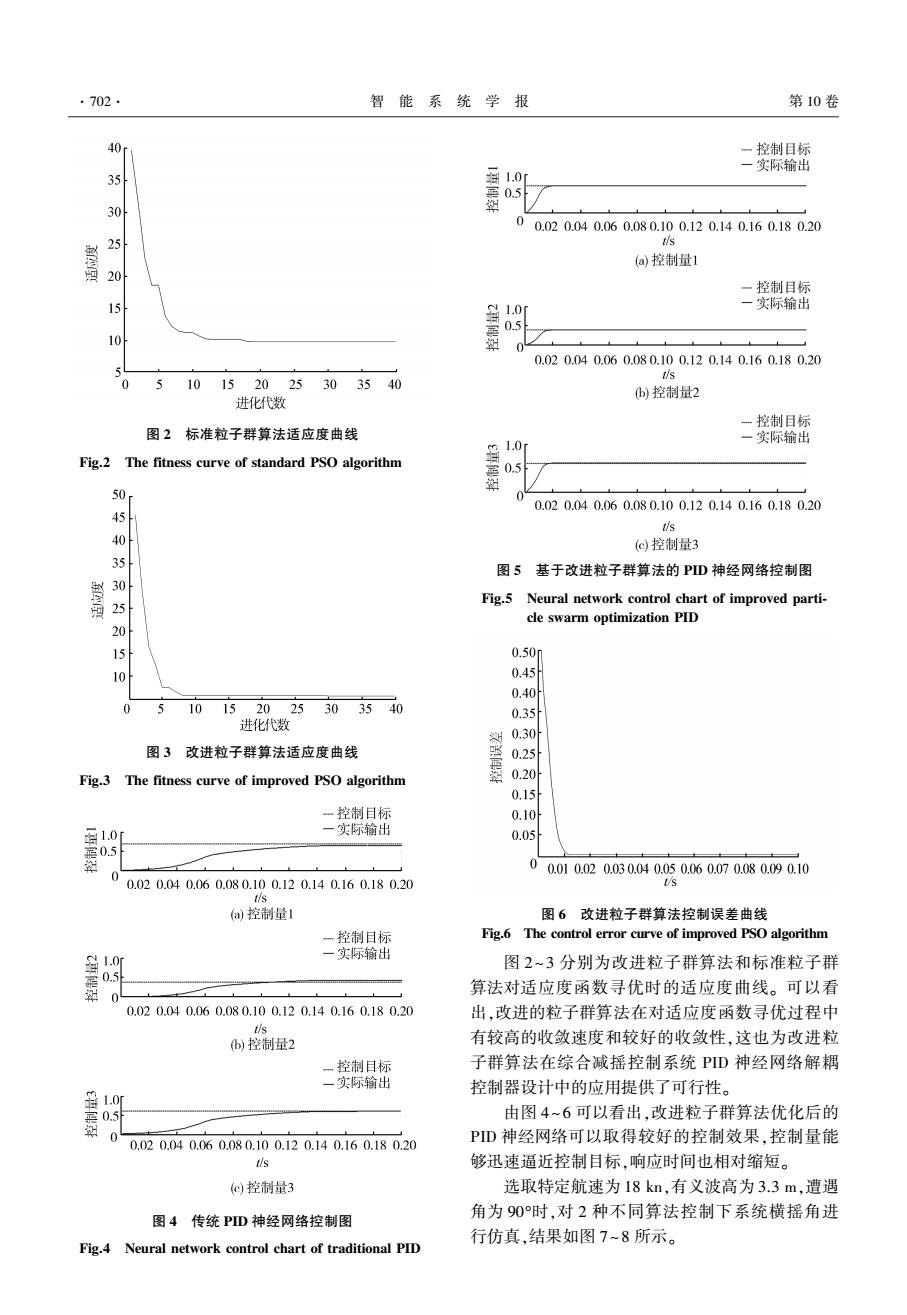
·702 智能系统学报 第10卷 40r 控制目标 一实际输出 35 0.5 30 0 0.020.040.060.080.100.120.140.160.180.20 s (a)控制量1 20 一控制目标 一实际输出 0.5 10 0.020.040.060.080.100.120.140.160.180.20 tis 0 510152025303540 )控制量2 进化代数 一控制目标 图2标准粒子群算法适应度曲线 1.0r 一实际输出 Fig.2 The fitness curve of standard PSO algorithm 0.5 50 0 0.020.040.060.080.100.120.140.160.180.20 tis 40 (c)控制量3 5 图5基于改进粒子群算法的PD神经网络控制图 0万 Fig.5 Neural network control chart of improved parti- cle swarm optimization PID 0.50m 0.45 0.40 0 10 152025 303540 0.35 进化代数 0.30 图3改进粒子群算法适应度曲线 0.25 Fig.3 The fitness curve of improved PSO algorithm 0.20 0.15 一控制目标 0.10 日1.01 一实际输出 0.05 00.010.020.030.040.050.060.070.080.090.10 0.020.040.060.080.100.120.140.160.180.20 s tis (a,控制量1 图6改进粒子群算法控制误差曲线 控制目标 Fig.6 The control error curve of improved PSO algorithm 一实际输出 图2~3分别为改进粒子群算法和标准粒子群 0.5 0 算法对适应度函数寻优时的适应度曲线。可以看 0.020.040.060.080.100.120.140.160.180.20 出,改进的粒子群算法在对适应度函数寻优过程中 tis b)控制量2 有较高的收敛速度和较好的收敛性,这也为改进粒 控制目标 子群算法在综合减摇控制系统PD神经网络解耦 一实际输出 控制器设计中的应用提供了可行性。 1.0 0.5 由图4~6可以看出,改进粒子群算法优化后的 PD神经网络可以取得较好的控制效果,控制量能 0.020.040.060.080.100.120.140.160.180.20 你 够迅速逼近控制目标,响应时间也相对缩短。 (@)控制量3 选取特定航速为18kn,有义波高为3.3m,遭遇 角为90时,对2种不同算法控制下系统横摇角进 图4传统PD神经网络控制图 行仿真,结果如图7~8所示。 Fig.4 Neural network control chart of traditional PID图 2 标准粒子群算法适应度曲线 Fig.2 The fitness curve of standard PSO algorithm 图 3 改进粒子群算法适应度曲线 Fig.3 The fitness curve of improved PSO algorithm 图 4 传统 PID 神经网络控制图 Fig.4 Neural network control chart of traditional PID 图 5 基于改进粒子群算法的 PID 神经网络控制图 Fig.5 Neural network control chart of improved parti⁃ cle swarm optimization PID 图 6 改进粒子群算法控制误差曲线 Fig.6 The control error curve of improved PSO algorithm 图 2~3 分别为改进粒子群算法和标准粒子群 算法对适应度函数寻优时的适应度曲线。 可以看 出,改进的粒子群算法在对适应度函数寻优过程中 有较高的收敛速度和较好的收敛性,这也为改进粒 子群算法在综合减摇控制系统 PID 神经网络解耦 控制器设计中的应用提供了可行性。 由图 4~6 可以看出,改进粒子群算法优化后的 PID 神经网络可以取得较好的控制效果,控制量能 够迅速逼近控制目标,响应时间也相对缩短。 选取特定航速为 18 kn,有义波高为 3.3 m,遭遇 角为 90°时,对 2 种不同算法控制下系统横摇角进 行仿真,结果如图 7~8 所示。 ·702· 智 能 系 统 学 报 第 10 卷