正在加载图片...
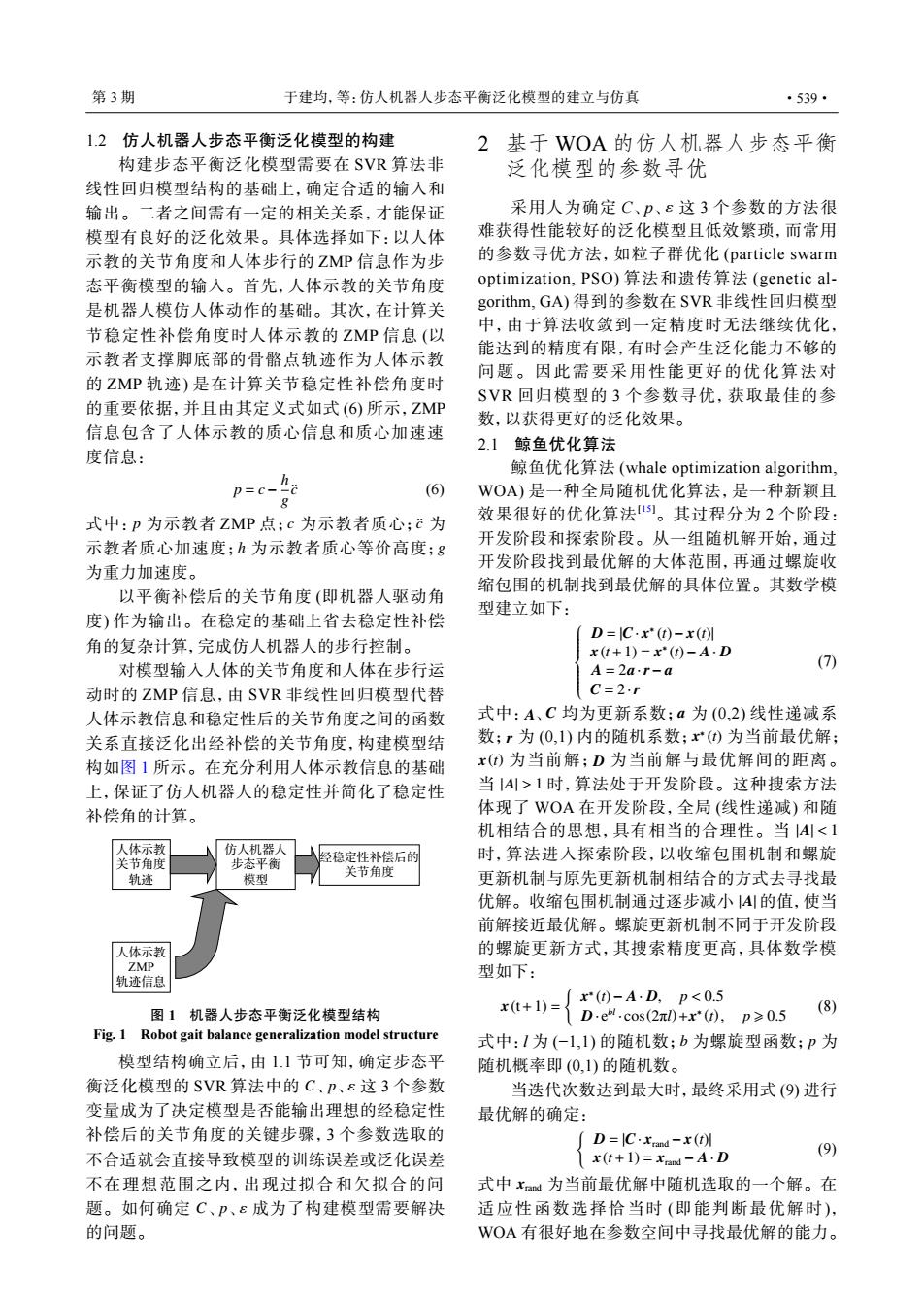
第3期 于建均,等:仿人机器人步态平衡泛化模型的建立与仿真 ·539· 1.2仿人机器人步态平衡泛化模型的构建 2基于WOA的仿人机器人步态平衡 构建步态平衡泛化模型需要在SVR算法非 泛化模型的参数寻优 线性回归模型结构的基础上,确定合适的输入和 输出。二者之间需有一定的相关关系,才能保证 采用人为确定C、p、ε这3个参数的方法很 模型有良好的泛化效果。具体选择如下:以人体 难获得性能较好的泛化模型且低效繁琐,而常用 示教的关节角度和人体步行的ZMP信息作为步 的参数寻优方法,如粒子群优化(particle swarm 态平衡模型的输入。首先,人体示教的关节角度 optimization,.PSO)算法和遗传算法(genetic al-. 是机器人模仿人体动作的基础。其次,在计算关 gorithm,GA)得到的参数在SVR非线性回归模型 节稳定性补偿角度时人体示教的ZMP信息(以 中,由于算法收敛到一定精度时无法继续优化, 能达到的精度有限,有时会产生泛化能力不够的 示教者支撑脚底部的骨骼点轨迹作为人体示教 问题。因此需要采用性能更好的优化算法对 的ZMP轨迹)是在计算关节稳定性补偿角度时 SVR回归模型的3个参数寻优,获取最佳的参 的重要依据,并且由其定义式如式(6)所示,ZMP 数,以获得更好的泛化效果。 信息包含了人体示教的质心信息和质心加速速 2.1鲸鱼优化算法 度信息: 鲸鱼优化算法(whale optimization algorithm, p=c-he (6) WOA)是一种全局随机优化算法,是一种新颖且 式中:p为示教者ZMP点;c为示教者质心;:为 效果很好的优化算法1。其过程分为2个阶段: 示教者质心加速度;h为示教者质心等价高度;g 开发阶段和探索阶段。从一组随机解开始,通过 为重力加速度。 开发阶段找到最优解的大体范围,再通过螺旋收 缩包围的机制找到最优解的具体位置。其数学模 以平衡补偿后的关节角度(即机器人驱动角 型建立如下: 度)作为输出。在稳定的基础上省去稳定性补偿 D=IC·x*(t)-x(t) 角的复杂计算,完成仿人机器人的步行控制。 x(t+1)=x*(t)-A·D 对模型输入人体的关节角度和人体在步行运 A=2a.r-a (7) 动时的ZMP信息,由SVR非线性回归模型代替 C=2.r 人体示教信息和稳定性后的关节角度之间的函数 式中:A、C均为更新系数;a为(0,2)线性递减系 关系直接泛化出经补偿的关节角度,构建模型结 数;r为(0,1)内的随机系数;x()为当前最优解; 构如图1所示。在充分利用人体示教信息的基础 x()为当前解;D为当前解与最优解间的距离。 上,保证了仿人机器人的稳定性并简化了稳定性 当4>1时,算法处于开发阶段。这种搜索方法 补偿角的计算。 体现了WOA在开发阶段,全局(线性递减)和随 机相结合的思想,具有相当的合理性。当A<1 人体示教 仿人机器人 经稳定性补偿后的 时,算法进入探索阶段,以收缩包围机制和螺旋 关节角度 步态平衡 关节角度 轨迹 模型 更新机制与原先更新机制相结合的方式去寻找最 优解。收缩包围机制通过逐步减小A的值,使当 前解接近最优解。螺旋更新机制不同于开发阶段 人体示教 的螺旋更新方式,其搜索精度更高,具体数学模 ZMP 型如下: 轨迹信息 x(0-A·D,p<0.5 图1机器人步态平衡泛化模型结构 x(t+1)= D.e.cos(2πl0+x(t),p≥0.5 (8) Fig.1 Robot gait balance generalization model structure 式中:1为(-1,1)的随机数;b为螺旋型函数;p为 模型结构确立后,由1.1节可知,确定步态平 随机概率即(0,1)的随机数。 衡泛化模型的SVR算法中的C、p、ε这3个参数 当迭代次数达到最大时,最终采用式(9)进行 变量成为了决定模型是否能输出理想的经稳定性 最优解的确定: 补偿后的关节角度的关键步骤,3个参数选取的 D=IC.xmd-x(t川 x(t+l)=xad-A·D (9) 不合适就会直接导致模型的训练误差或泛化误差 不在理想范围之内,出现过拟合和欠拟合的问 式中xa为当前最优解中随机选取的一个解。在 题。如何确定C、p、ε成为了构建模型需要解决 适应性函数选择恰当时(即能判断最优解时), 的问题。 WOA有很好地在参数空间中寻找最优解的能力。1.2 仿人机器人步态平衡泛化模型的构建 构建步态平衡泛化模型需要在 SVR 算法非 线性回归模型结构的基础上,确定合适的输入和 输出。二者之间需有一定的相关关系,才能保证 模型有良好的泛化效果。具体选择如下:以人体 示教的关节角度和人体步行的 ZMP 信息作为步 态平衡模型的输入。首先,人体示教的关节角度 是机器人模仿人体动作的基础。其次,在计算关 节稳定性补偿角度时人体示教的 ZMP 信息 (以 示教者支撑脚底部的骨骼点轨迹作为人体示教 的 ZMP 轨迹) 是在计算关节稳定性补偿角度时 的重要依据,并且由其定义式如式 (6) 所示,ZMP 信息包含了人体示教的质心信息和质心加速速 度信息: p = c− h g c¨ (6) p c c¨ h g 式中: 为示教者 ZMP 点; 为示教者质心; 为 示教者质心加速度; 为示教者质心等价高度; 为重力加速度。 以平衡补偿后的关节角度 (即机器人驱动角 度) 作为输出。在稳定的基础上省去稳定性补偿 角的复杂计算,完成仿人机器人的步行控制。 对模型输入人体的关节角度和人体在步行运 动时的 ZMP 信息,由 SVR 非线性回归模型代替 人体示教信息和稳定性后的关节角度之间的函数 关系直接泛化出经补偿的关节角度,构建模型结 构如图 1 所示。在充分利用人体示教信息的基础 上,保证了仿人机器人的稳定性并简化了稳定性 补偿角的计算。 人体示教 关节角度 轨迹 仿人机器人 步态平衡 模型 经稳定性补偿后的 关节角度 人体示教 ZMP 轨迹信息 图 1 机器人步态平衡泛化模型结构 Fig. 1 Robot gait balance generalization model structure C p ε C p ε 模型结构确立后,由 1.1 节可知,确定步态平 衡泛化模型的 SVR 算法中的 、 、 这 3 个参数 变量成为了决定模型是否能输出理想的经稳定性 补偿后的关节角度的关键步骤,3 个参数选取的 不合适就会直接导致模型的训练误差或泛化误差 不在理想范围之内,出现过拟合和欠拟合的问 题。如何确定 、 、 成为了构建模型需要解决 的问题。 2 基于 WOA 的仿人机器人步态平衡 泛化模型的参数寻优 采用人为确定 C、p、ε 这 3 个参数的方法很 难获得性能较好的泛化模型且低效繁琐,而常用 的参数寻优方法,如粒子群优化 (particle swarm optimization, PSO) 算法和遗传算法 (genetic algorithm, GA) 得到的参数在 SVR 非线性回归模型 中,由于算法收敛到一定精度时无法继续优化, 能达到的精度有限,有时会产生泛化能力不够的 问题。因此需要采用性能更好的优化算法对 SVR 回归模型的 3 个参数寻优,获取最佳的参 数,以获得更好的泛化效果。 2.1 鲸鱼优化算法 鲸鱼优化算法 (whale optimization algorithm, WOA) 是一种全局随机优化算法,是一种新颖且 效果很好的优化算法[15]。其过程分为 2 个阶段: 开发阶段和探索阶段。从一组随机解开始,通过 开发阶段找到最优解的大体范围,再通过螺旋收 缩包围的机制找到最优解的具体位置。其数学模 型建立如下: D = |C· x ∗ (t)− x(t)| x(t+1) = x ∗ (t)− A· D A = 2a ·r− a C = 2 ·r (7) A C a r x ∗ (t) x(t) D |A| > 1 |A| < 1 |A| 式中: 、 均为更新系数; 为 (0,2) 线性递减系 数; 为 (0,1) 内的随机系数; 为当前最优解; 为当前解; 为当前解与最优解间的距离。 当 时,算法处于开发阶段。这种搜索方法 体现了 WOA 在开发阶段,全局 (线性递减) 和随 机相结合的思想,具有相当的合理性。当 时,算法进入探索阶段,以收缩包围机制和螺旋 更新机制与原先更新机制相结合的方式去寻找最 优解。收缩包围机制通过逐步减小 的值,使当 前解接近最优解。螺旋更新机制不同于开发阶段 的螺旋更新方式,其搜索精度更高,具体数学模 型如下: x(t+1) = { x ∗ (t)− A· D, p < 0.5 D· e bl · cos(2πl)+x ∗ (t), p ⩾ 0.5 (8) 式中:l 为 (−1,1) 的随机数; b 为螺旋型函数; p 为 随机概率即 (0,1) 的随机数。 当迭代次数达到最大时,最终采用式 (9) 进行 最优解的确定: { D = |C· xrand − x(t)| x(t+1) = xrand − A· D (9) 式中 xrand 为当前最优解中随机选取的一个解。在 适应性函数选择恰当时 (即能判断最优解时), WOA 有很好地在参数空间中寻找最优解的能力。 第 3 期 于建均,等:仿人机器人步态平衡泛化模型的建立与仿真 ·539·