正在加载图片...
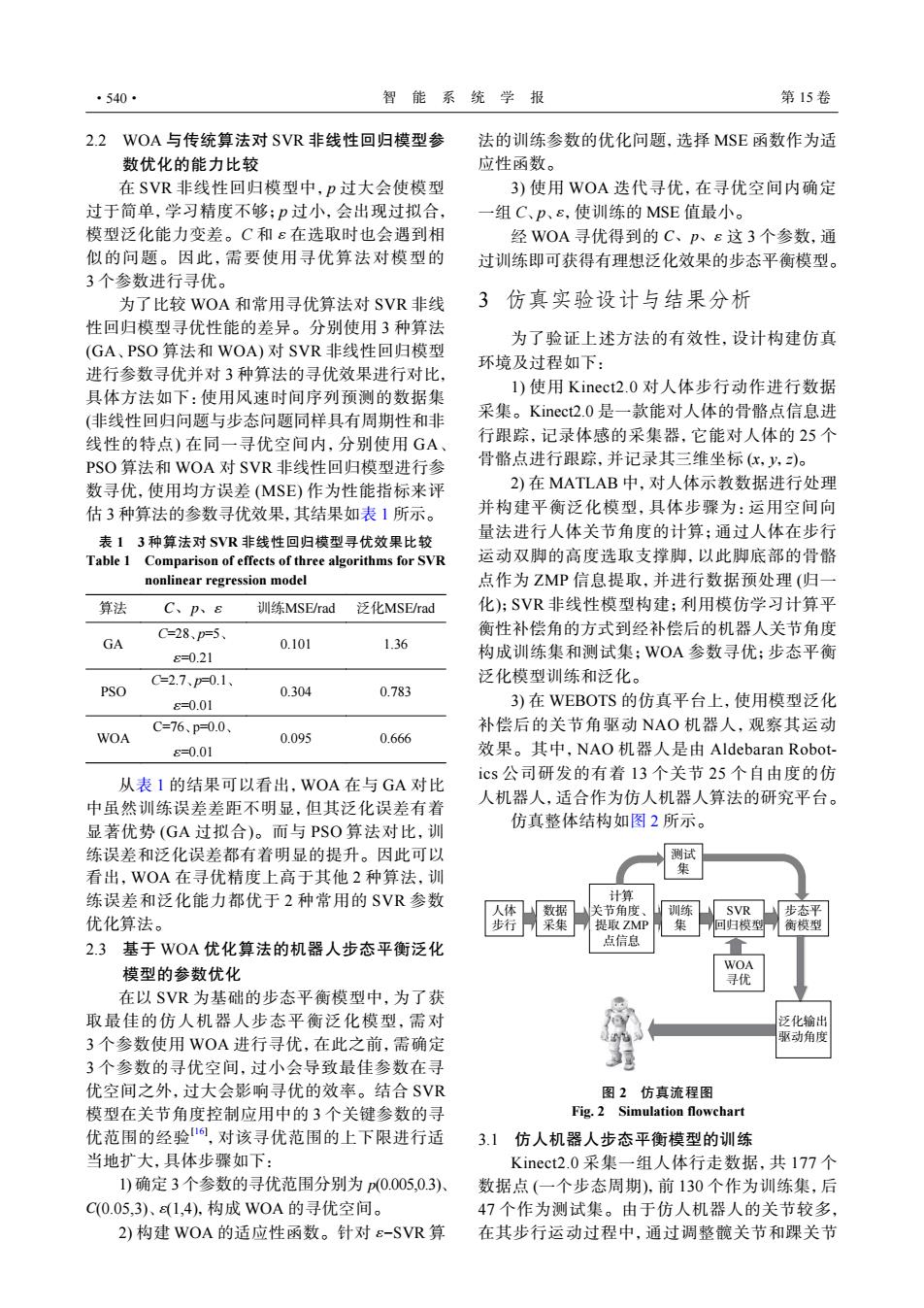
·540· 智能系统学报 第15卷 2.2WOA与传统算法对SVR非线性回归模型参 法的训练参数的优化问题,选择MSE函数作为适 数优化的能力比较 应性函数。 在SVR非线性回归模型中,p过大会使模型 3)使用WOA迭代寻优,在寻优空间内确定 过于简单,学习精度不够;P过小,会出现过拟合, 组C、p、8,使训练的MSE值最小。 模型泛化能力变差。C和ε在选取时也会遇到相 经WOA寻优得到的C、p、E这3个参数,通 似的问题。因此,需要使用寻优算法对模型的 过训练即可获得有理想泛化效果的步态平衡模型。 3个参数进行寻优。 为了比较WOA和常用寻优算法对SVR非线 3仿真实验设计与结果分析 性回归模型寻优性能的差异。分别使用3种算法 为了验证上述方法的有效性,设计构建仿真 (GA、PSO算法和WOA)对SVR非线性回归模型 进行参数寻优并对3种算法的寻优效果进行对比, 环境及过程如下: 具体方法如下:使用风速时间序列预测的数据集 1)使用Kinect2.0对人体步行动作进行数据 (非线性回归问题与步态问题同样具有周期性和非 采集。Kinect2.0是一款能对人体的骨骼点信息进 线性的特点)在同一寻优空间内,分别使用GA、 行跟踪,记录体感的采集器,它能对人体的25个 PSO算法和WOA对SVR非线性回归模型进行参 骨骼点进行跟踪,并记录其三维坐标(x,八,)。 数寻优,使用均方误差(MSE)作为性能指标来评 2)在MATLAB中,对人体示教数据进行处理 估3种算法的参数寻优效果,其结果如表1所示。 并构建平衡泛化模型,具体步骤为:运用空间向 量法进行人体关节角度的计算;通过人体在步行 表13种算法对SVR非线性回归模型寻优效果比较 Table 1 Comparison of effects of three algorithms for SVR 运动双脚的高度选取支撑脚,以此脚底部的骨骼 nonlinear regression model 点作为ZMP信息提取,并进行数据预处理(归一 算法 C、p、E 训练MSE/rad 泛化MSE/rad 化);SVR非线性模型构建;利用模仿学习计算平 C=28、p=5 衡性补偿角的方式到经补偿后的机器人关节角度 GA 0.101 1.36 e=0.21 构成训练集和测试集;WOA参数寻优:步态平衡 C=2.7、p=0.1 泛化模型训练和泛化。 PSO 0.304 0.783 8=0.01 3)在WEBOTS的仿真平台上,使用模型泛化 C=76、p-0.0 补偿后的关节角驱动NAO机器人,观察其运动 WOA 0.095 0.666 =0.01 效果。其中,NAO机器人是由Aldebaran Robot-. ics公司研发的有着13个关节25个自由度的仿 从表1的结果可以看出,WOA在与GA对比 中虽然训练误差差距不明显,但其泛化误差有着 人机器人,适合作为仿人机器人算法的研究平台。 显著优势(GA过拟合)。而与PSO算法对比,训 仿真整体结构如图2所示。 练误差和泛化误差都有着明显的提升。因此可以 测试 看出,WOA在寻优精度上高于其他2种算法,训 集 练误差和泛化能力都优于2种常用的SVR参数 计算 人体 数据 关节角度 训练 SVR 步态平 优化算法。 步行 采集 提取ZMP 集 回归模型 衡模型 2.3基于WOA优化算法的机器人步态平衡泛化 点信息 WOA 模型的参数优化 寻优 在以SVR为基础的步态平衡模型中,为了获 取最佳的仿人机器人步态平衡泛化模型,需对 泛化输出 3个参数使用WOA进行寻优,在此之前,需确定 驱动角度 3个参数的寻优空间,过小会导致最佳参数在寻 优空间之外,过大会影响寻优的效率。结合SVR 图2仿真流程图 模型在关节角度控制应用中的3个关键参数的寻 Fig.2 Simulation flowchart 优范围的经验,对该寻优范围的上下限进行适 3.1 仿人机器人步态平衡模型的训练 当地扩大,具体步骤如下: Kinect2.0采集一组人体行走数据,共177个 1)确定3个参数的寻优范围分别为p0.005,0.3)、 数据点(一个步态周期),前130个作为训练集,后 C(0.05,3)、(1,4),构成WOA的寻优空间。 47个作为测试集。由于仿人机器人的关节较多, 2)构建WOA的适应性函数。针对E-SVR算 在其步行运动过程中,通过调整髋关节和踝关节2.2 WOA 与传统算法对 SVR 非线性回归模型参 数优化的能力比较 ε 在 SVR 非线性回归模型中,p 过大会使模型 过于简单,学习精度不够;p 过小,会出现过拟合, 模型泛化能力变差。C 和 在选取时也会遇到相 似的问题。因此,需要使用寻优算法对模型的 3 个参数进行寻优。 为了比较 WOA 和常用寻优算法对 SVR 非线 性回归模型寻优性能的差异。分别使用 3 种算法 (GA、PSO 算法和 WOA) 对 SVR 非线性回归模型 进行参数寻优并对 3 种算法的寻优效果进行对比, 具体方法如下:使用风速时间序列预测的数据集 (非线性回归问题与步态问题同样具有周期性和非 线性的特点) 在同一寻优空间内,分别使用 GA、 PSO 算法和 WOA 对 SVR 非线性回归模型进行参 数寻优,使用均方误差 (MSE) 作为性能指标来评 估 3 种算法的参数寻优效果,其结果如表 1 所示。 表 1 3 种算法对 SVR 非线性回归模型寻优效果比较 Table 1 Comparison of effects of three algorithms for SVR nonlinear regression model 算法 C、p、ε 训练MSE/rad 泛化MSE/rad GA ε C=28、p=5、 =0.21 0.101 1.36 PSO ε C=2.7、p=0.1、 =0.01 0.304 0.783 WOA ε C=76、p=0.0、 =0.01 0.095 0.666 从表 1 的结果可以看出,WOA 在与 GA 对比 中虽然训练误差差距不明显,但其泛化误差有着 显著优势 (GA 过拟合)。而与 PSO 算法对比,训 练误差和泛化误差都有着明显的提升。因此可以 看出,WOA 在寻优精度上高于其他 2 种算法,训 练误差和泛化能力都优于 2 种常用的 SVR 参数 优化算法。 2.3 基于 WOA 优化算法的机器人步态平衡泛化 模型的参数优化 在以 SVR 为基础的步态平衡模型中,为了获 取最佳的仿人机器人步态平衡泛化模型,需对 3 个参数使用 WOA 进行寻优,在此之前,需确定 3 个参数的寻优空间,过小会导致最佳参数在寻 优空间之外,过大会影响寻优的效率。结合 SVR 模型在关节角度控制应用中的 3 个关键参数的寻 优范围的经验[16] ,对该寻优范围的上下限进行适 当地扩大,具体步骤如下: p C ε 1) 确定 3 个参数的寻优范围分别为 (0.005,0.3)、 (0.05,3)、 (1,4),构成 WOA 的寻优空间。 2) 构建 WOA 的适应性函数。针对 ε−SVR 算 法的训练参数的优化问题,选择 MSE 函数作为适 应性函数。 ε 3) 使用 WOA 迭代寻优,在寻优空间内确定 一组 C、p、 ,使训练的 MSE 值最小。 经 WOA 寻优得到的 C、p、ε 这 3 个参数,通 过训练即可获得有理想泛化效果的步态平衡模型。 3 仿真实验设计与结果分析 为了验证上述方法的有效性,设计构建仿真 环境及过程如下: 1) 使用 Kinect2.0 对人体步行动作进行数据 采集。Kinect2.0 是一款能对人体的骨骼点信息进 行跟踪,记录体感的采集器,它能对人体的 25 个 骨骼点进行跟踪,并记录其三维坐标 (x,y,z)。 2) 在 MATLAB 中,对人体示教数据进行处理 并构建平衡泛化模型,具体步骤为:运用空间向 量法进行人体关节角度的计算;通过人体在步行 运动双脚的高度选取支撑脚,以此脚底部的骨骼 点作为 ZMP 信息提取,并进行数据预处理 (归一 化);SVR 非线性模型构建;利用模仿学习计算平 衡性补偿角的方式到经补偿后的机器人关节角度 构成训练集和测试集;WOA 参数寻优;步态平衡 泛化模型训练和泛化。 3) 在 WEBOTS 的仿真平台上,使用模型泛化 补偿后的关节角驱动 NAO 机器人,观察其运动 效果。其中,NAO 机器人是由 Aldebaran Robotics 公司研发的有着 13 个关节 25 个自由度的仿 人机器人,适合作为仿人机器人算法的研究平台。 仿真整体结构如图 2 所示。 测试 集 训练 集 SVR 回归模型 步态平 衡模型 计算 关节角度、 提取 ZMP 点信息 人体 步行 数据 采集 WOA 寻优 泛化输出 驱动角度 图 2 仿真流程图 Fig. 2 Simulation flowchart 3.1 仿人机器人步态平衡模型的训练 Kinect2.0 采集一组人体行走数据,共 177 个 数据点 (一个步态周期),前 130 个作为训练集,后 47 个作为测试集。由于仿人机器人的关节较多, 在其步行运动过程中,通过调整髋关节和踝关节 ·540· 智 能 系 统 学 报 第 15 卷