正在加载图片...
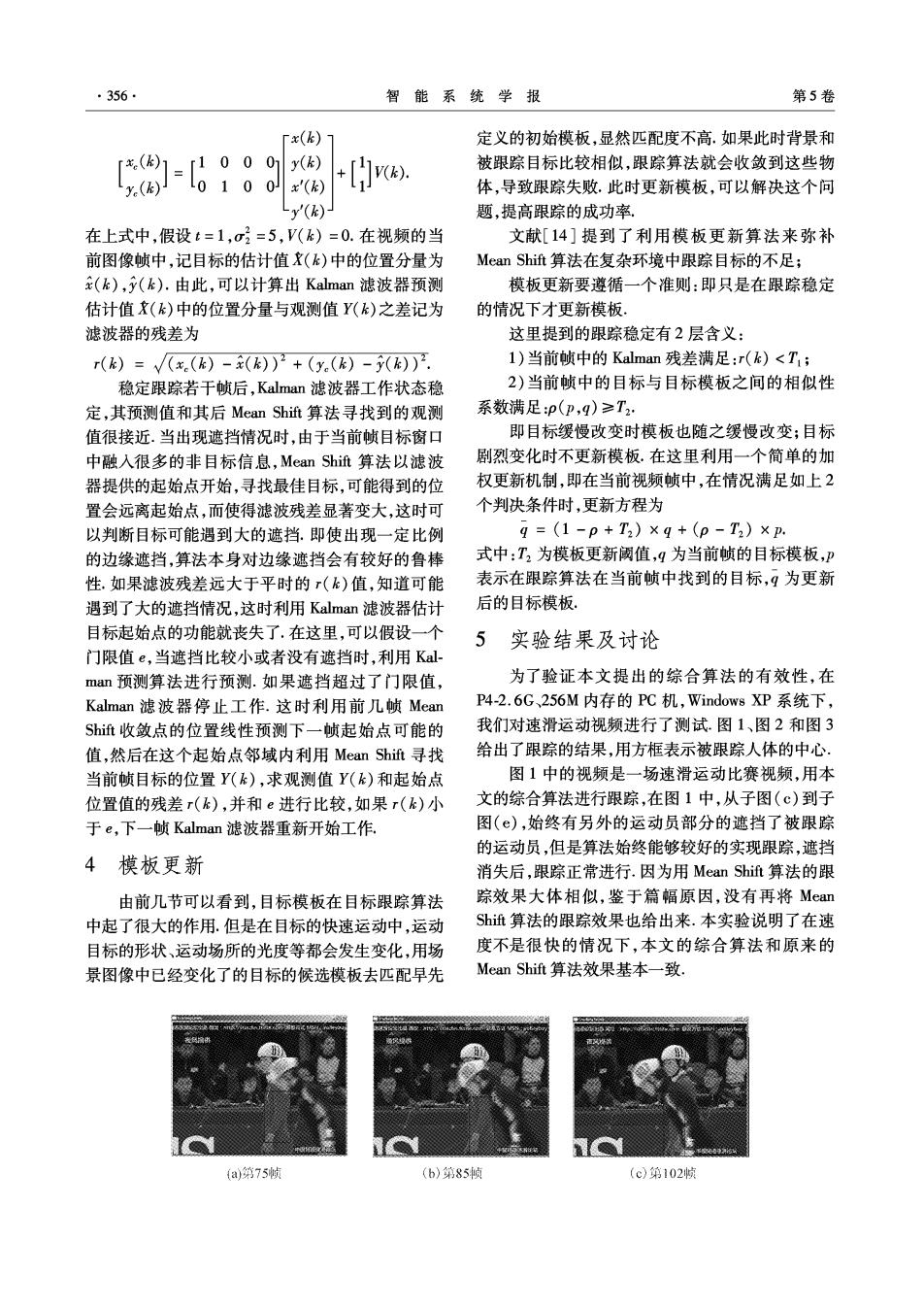
·356 智能系统学报 第5卷 厂x(k) 定义的初始模板,显然匹配度不高,如果此时背景和 「() r100 01 y() V(k) 被跟踪目标比较相似,跟踪算法就会收敛到这些物 y.() 10100J x'(k) 体,导致跟踪失败.此时更新模板,可以解决这个问 Ly'() 题,提高跟踪的成功率。 在上式中,假设t=1,σ号=5,V(k)=0.在视频的当 文献[14]提到了利用模板更新算法来弥补 前图像帧中,记目标的估计值()中的位置分量为 Mean Shift算法在复杂环境中跟踪目标的不足; (k),y(k).由此,可以计算出Kalman滤波器预测 模板更新要遵循一个准则:即只是在跟踪稳定 估计值()中的位置分量与观测值Y(k)之差记为 的情况下才更新模板, 滤波器的残差为 这里提到的跟踪稳定有2层含义: r()=√(.(k)-x()2+(y.(k)-y(k). 1)当前帧中的Kalman残差满足:r(k)<T1; 稳定跟踪若干帧后,Kalman滤波器工作状态稳 2)当前帧中的目标与目标模板之间的相似性 定,其预测值和其后Mean Sh进算法寻找到的观测 系数满足:p(p,q)≥T2: 值很接近.当出现遮挡情况时,由于当前帧目标窗口 即目标缓慢改变时模板也随之缓慢改变;目标 中融入很多的非目标信息,Mean Shift算法以滤波 剧烈变化时不更新模板.在这里利用一个简单的加 器提供的起始点开始,寻找最佳目标,可能得到的位 权更新机制,即在当前视频帧中,在情况满足如上2 置会远离起始点,而使得滤波残差显著变大,这时可 个判决条件时,更新方程为 以判断目标可能遇到大的遮挡.即使出现一定比例 9=(1-p+T2)×q+(p-T2)×p. 的边缘遮挡,算法本身对边缘遮挡会有较好的鲁棒 式中:T2为模板更新阈值,q为当前帧的目标模板,p 性.如果滤波残差远大于平时的r(k)值,知道可能 表示在跟踪算法在当前帧中找到的目标,9为更新 遇到了大的遮挡情况,这时利用Kalman滤波器估计 后的目标模板, 目标起始点的功能就丧失了.在这里,可以假设一个 5实验结果及讨论 门限值e,当遮挡比较小或者没有遮挡时,利用Kl man预测算法进行预测.如果遮挡超过了门限值, 为了验证本文提出的综合算法的有效性,在 Kalman滤波器停止工作.这时利用前几帧Mean P4-2.6G、256M内存的P℃机,Windows XP系统下, Shit收敛点的位置线性预测下一帧起始点可能的 我们对速滑运动视频进行了测试.图1、图2和图3 值,然后在这个起始点邻域内利用Mean Shift寻找 给出了跟踪的结果,用方框表示被跟踪人体的中心。 当前帧目标的位置Y(k),求观测值Y()和起始点 图1中的视频是一场速滑运动比赛视频,用本 位置值的残差r(k),并和e进行比较,如果r(k)小 文的综合算法进行跟踪,在图1中,从子图(c)到子 于e,下一帧Kalman滤波器重新开始工作. 图(),始终有另外的运动员部分的遮挡了被跟踪 的运动员,但是算法始终能够较好的实现跟踪,遮挡 4模板更新 消失后,跟踪正常进行.因为用Mean Shif讥算法的跟 由前几节可以看到,目标模板在目标跟踪算法 踪效果大体相似,鉴于篇幅原因,没有再将Mean 中起了很大的作用.但是在目标的快速运动中,运动 Sh近算法的跟踪效果也给出来.本实验说明了在速 目标的形状、运动场所的光度等都会发生变化,用场 度不是很快的情况下,本文的综合算法和原来的 景图像中已经变化了的目标的候选模板去匹配早先 Mean Shift算法效果基本一致. (a)第75帧 (b)第85帧 (c)第102帧