正在加载图片...
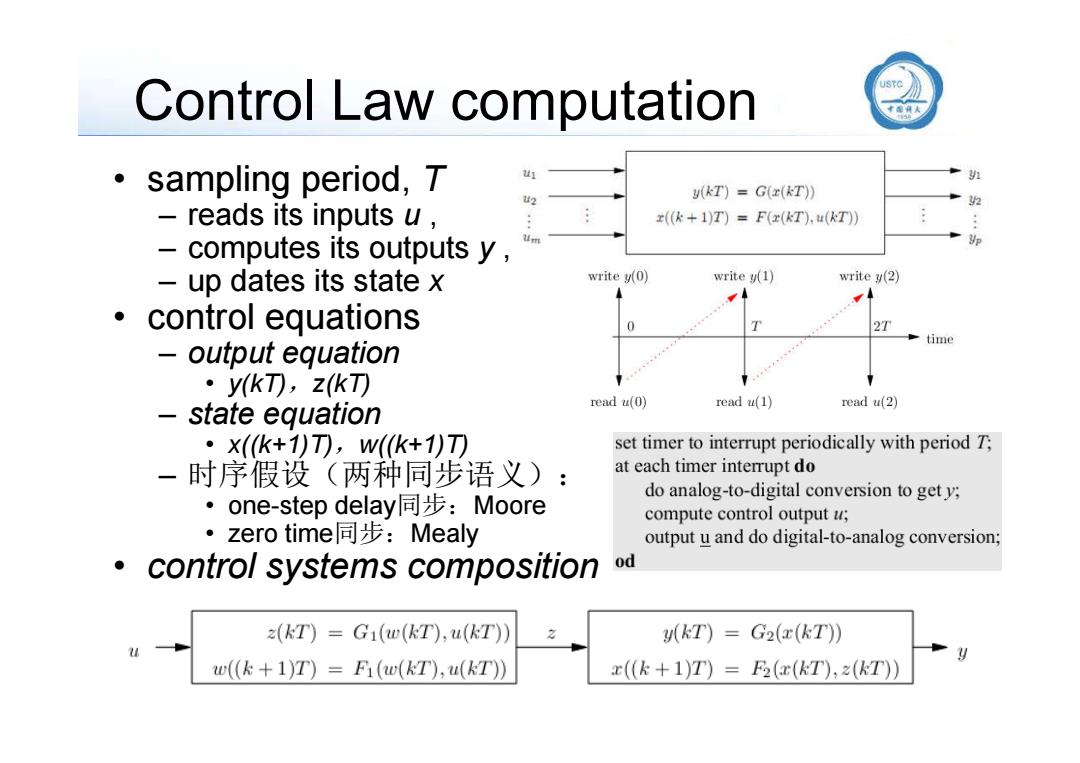
Control Law computation sampling period,T (kT)=Gx(T)》 reads its inputs u, ((k+1)T)F(x(kT).u(kT)) computes its outputs y, n up dates its state x write (0) write (1) write y(2) 小 control equations 0 T 2T 套time output equation ·ykT可,zkT) read u(0) read u(1) read u(2) state equation ·x(k+1)T,w(k+1)T) set timer to interrupt periodically with period T; 一时序假设(两种同步语义): at each timer interrupt do ·one-step delay同步:Moore do analog-to-digital conversion to gety; compute control output u; ·zero time同步:Mealy output u and do digital-to-analog conversion; control systems composition od 2(kT)G1(w(kT),u(kT)) y(kT)=G2(x(kT)) w((k +1)T)=Fi(w(kT),u(kT)) x((k+1T)=F2(x(kT),z(kT))Control Law computation • sampling period, T – reads its inputs u , – computes its outputs y , – up dates its state x • control equations – output equation • y(kT),z(kT) – state equation • x((k+1)T),w((k+1)T) – 时序假设(两种同步语义): • one-step delay同步:Moore • zero time同步:Mealy • control systems composition