正在加载图片...
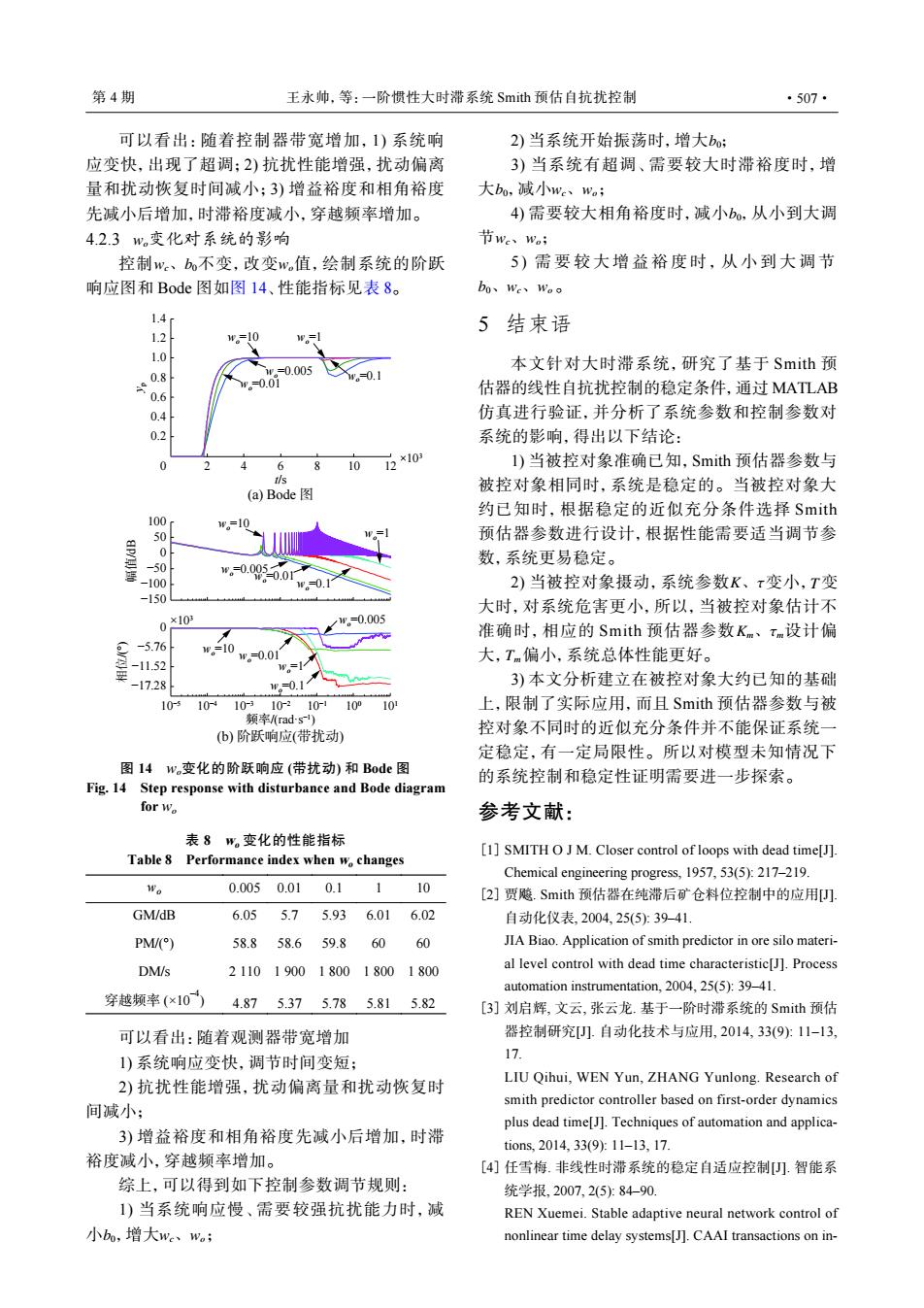
第4期 王永帅,等:一阶惯性大时滞系统Smith预估自抗扰控制 ·507· 可以看出:随着控制器带宽增加,1)系统响 2)当系统开始振荡时,增大bo: 应变快,出现了超调:2)抗扰性能增强,扰动偏离 3)当系统有超调、需要较大时滞裕度时,增 量和扰动恢复时间减小:3)增益裕度和相角裕度 大bo,减小we、wo: 先减小后增加,时滞裕度减小,穿越频率增加。 4)需要较大相角裕度时,减小b,从小到大调 4.2.3w变化对系统的影响 节we、Wo: 控制we、b不变,改变w值,绘制系统的阶跃 5)需要较大增益裕度时,从小到大调节 响应图和Bode图如图14、性能指标见表8。 bo、we、wao 1.4 5结束语 1.2 1.0 =000 本文针对大时滞系统,研究了基于Smith预 0.8 s9 =0.01 估器的线性自抗扰控制的稳定条件,通过MATLAB 0.6 0.4 仿真进行验证,并分析了系统参数和控制参数对 0.2 系统的影响,得出以下结论: 6 10 12*10 1)当被控对象准确已知,Smith预估器参数与 us (a)Bode图 被控对象相同时,系统是稳定的。当被控对象大 约已知时,根据稳定的近似充分条件选择Smith 100 30,=10 50 预估器参数进行设计,根据性能需要适当调节参 0 数,系统更易稳定。 -50 -100 ,=0.0000 1=0.11 2)当被控对象摄动,系统参数K、τ变小,T变 -150 大时,对系统危害更小,所以,当被控对象估计不 0x10 w。=0.005 w 准确时,相应的Smith预估器参数Km、Tm设计偏 -5.76 w.=10 w=0.01 大,Tm偏小,系统总体性能更好。 -11.52 。=14 -17.28 "=0.1 3)本文分析建立在被控对象大约已知的基础 10s 10 10-310r210-1100 10 上,限制了实际应用,而且Smith预估器参数与被 频率rads) (b)阶跃响应(带扰动) 控对象不同时的近似充分条件并不能保证系统一 定稳定,有一定局限性。所以对模型未知情况下 图14w,变化的阶跃响应(带扰动)和Bode图 的系统控制和稳定性证明需要进一步探索。 Fig.14 Step response with disturbance and Bode diagram for we 参考文献: 表8W。变化的性能指标 Table 8 [1]SMITH O J M.Closer control of loops with dead time[J]. Performance index when w changes Chemical engineering progress,1957,53(5):217-219. 。 0.0050.01 0.1 10 [2]贾飚.Smith预估器在纯滞后矿仓料位控制中的应用U GM/dB 6.05 5.7 5.93 6.01 6.02 自动化仪表,2004,25(5):39-41 PM/() 58.8 58.6 59.8 60 60 JIA Biao.Application of smith predictor in ore silo materi- DM/s 21101900180018001800 al level control with dead time characteristic[J].Process automation instrumentation,2004,25(5):39-41 穿越频率(×10 4.875.375.785.815.82 [3]刘启辉,文云,张云龙.基于一阶时滞系统的Smith预估 可以看出:随着观测器带宽增加 器控制研究).自动化技术与应用,2014,33(9少:11-13, 1)系统响应变快,调节时间变短; 17 2)抗扰性能增强,扰动偏离量和扰动恢复时 LIU Qihui,WEN Yun,ZHANG Yunlong.Research of smith predictor controller based on first-order dynamics 间减小; plus dead time[J].Techniques of automation and applica- 3)增益裕度和相角裕度先减小后增加,时滞 tions.2014,33(9:11-13,17. 裕度减小,穿越频率增加。 [4]任雪梅.非线性时滞系统的稳定自适应控制[).智能系 综上,可以得到如下控制参数调节规则: 统学报,2007,2584-90. 1)当系统响应慢、需要较强抗扰能力时,减 REN Xuemei.Stable adaptive neural network control of 小b0,增大w、wo; nonlinear time delay systems[J].CAAI transactions on in-可以看出:随着控制器带宽增加,1) 系统响 应变快,出现了超调;2) 抗扰性能增强,扰动偏离 量和扰动恢复时间减小;3) 增益裕度和相角裕度 先减小后增加,时滞裕度减小,穿越频率增加。 4.2.3 wo变化对系统的影响 控制 wc、b0不变,改变 wo值,绘制系统的阶跃 响应图和 Bode 图如图 14、性能指标见表 8。 0 2 4 6 8 10 12 0.2 0.4 0.6 0.8 1.0 1.2 1.4 wo=0.005 wo=0.005 wo=0.01 wo=0.01 wo=0.1 wo=0.1 wo=1 wo=1 wo=10 yp t/s (a) Bode 图 −150 −100 −50 0 50 100 wo=0.005 wo=0.01 wo=0.1 wo=1 wo=10 −17.28 −11.52 −5.76 0 10−5 10−4 10−3 10−2 10−1 100 101 频率/(rad·s−1) 幅值/dB 相位/(°) (b) 阶跃响应(带扰动) ×103 ×103 wo=10 图 14 wo变化的阶跃响应 (带扰动) 和 Bode 图 wo Fig. 14 Step response with disturbance and Bode diagram for 表 8 wo 变化的性能指标 Table 8 Performance index when wo changes wo 0.005 0.01 0.1 1 10 GM/dB 6.05 5.7 5.93 6.01 6.02 PM/(°) 58.8 58.6 59.8 60 60 DM/s 2 110 1 900 1 800 1 800 1 800 穿越频率 (×10–4) 4.87 5.37 5.78 5.81 5.82 可以看出:随着观测器带宽增加 1) 系统响应变快,调节时间变短; 2) 抗扰性能增强,扰动偏离量和扰动恢复时 间减小; 3) 增益裕度和相角裕度先减小后增加,时滞 裕度减小,穿越频率增加。 综上,可以得到如下控制参数调节规则: b0 wc、wo 1) 当系统响应慢、需要较强抗扰能力时,减 小 ,增大 ; 2) 当系统开始振荡时,增大 b0; b0 wc、wo 3) 当系统有超调、需要较大时滞裕度时,增 大 ,减小 ; b0 wc、wo 4) 需要较大相角裕度时,减小 ,从小到大调 节 ; b0、wc、wo 5) 需要较大增益裕度时,从小到大调节 。 5 结束语 本文针对大时滞系统,研究了基于 Smith 预 估器的线性自抗扰控制的稳定条件,通过 MATLAB 仿真进行验证,并分析了系统参数和控制参数对 系统的影响,得出以下结论: 1) 当被控对象准确已知,Smith 预估器参数与 被控对象相同时,系统是稳定的。当被控对象大 约已知时,根据稳定的近似充分条件选择 Smith 预估器参数进行设计,根据性能需要适当调节参 数,系统更易稳定。 K、τ T Km、τm Tm 2) 当被控对象摄动,系统参数 变小, 变 大时,对系统危害更小,所以,当被控对象估计不 准确时,相应的 Smith 预估器参数 设计偏 大, 偏小,系统总体性能更好。 3) 本文分析建立在被控对象大约已知的基础 上,限制了实际应用,而且 Smith 预估器参数与被 控对象不同时的近似充分条件并不能保证系统一 定稳定,有一定局限性。所以对模型未知情况下 的系统控制和稳定性证明需要进一步探索。 参考文献: SMITH O J M. Closer control of loops with dead time[J]. Chemical engineering progress, 1957, 53(5): 217–219. [1] 贾飚. Smith 预估器在纯滞后矿仓料位控制中的应用[J]. 自动化仪表, 2004, 25(5): 39–41. JIA Biao. Application of smith predictor in ore silo material level control with dead time characteristic[J]. Process automation instrumentation, 2004, 25(5): 39–41. [2] 刘启辉, 文云, 张云龙. 基于一阶时滞系统的 Smith 预估 器控制研究[J]. 自动化技术与应用, 2014, 33(9): 11–13, 17. LIU Qihui, WEN Yun, ZHANG Yunlong. Research of smith predictor controller based on first-order dynamics plus dead time[J]. Techniques of automation and applications, 2014, 33(9): 11–13, 17. [3] 任雪梅. 非线性时滞系统的稳定自适应控制[J]. 智能系 统学报, 2007, 2(5): 84–90. REN Xuemei. Stable adaptive neural network control of nonlinear time delay systems[J]. CAAI transactions on in- [4] 第 4 期 王永帅,等:一阶惯性大时滞系统 Smith 预估自抗扰控制 ·507·