正在加载图片...
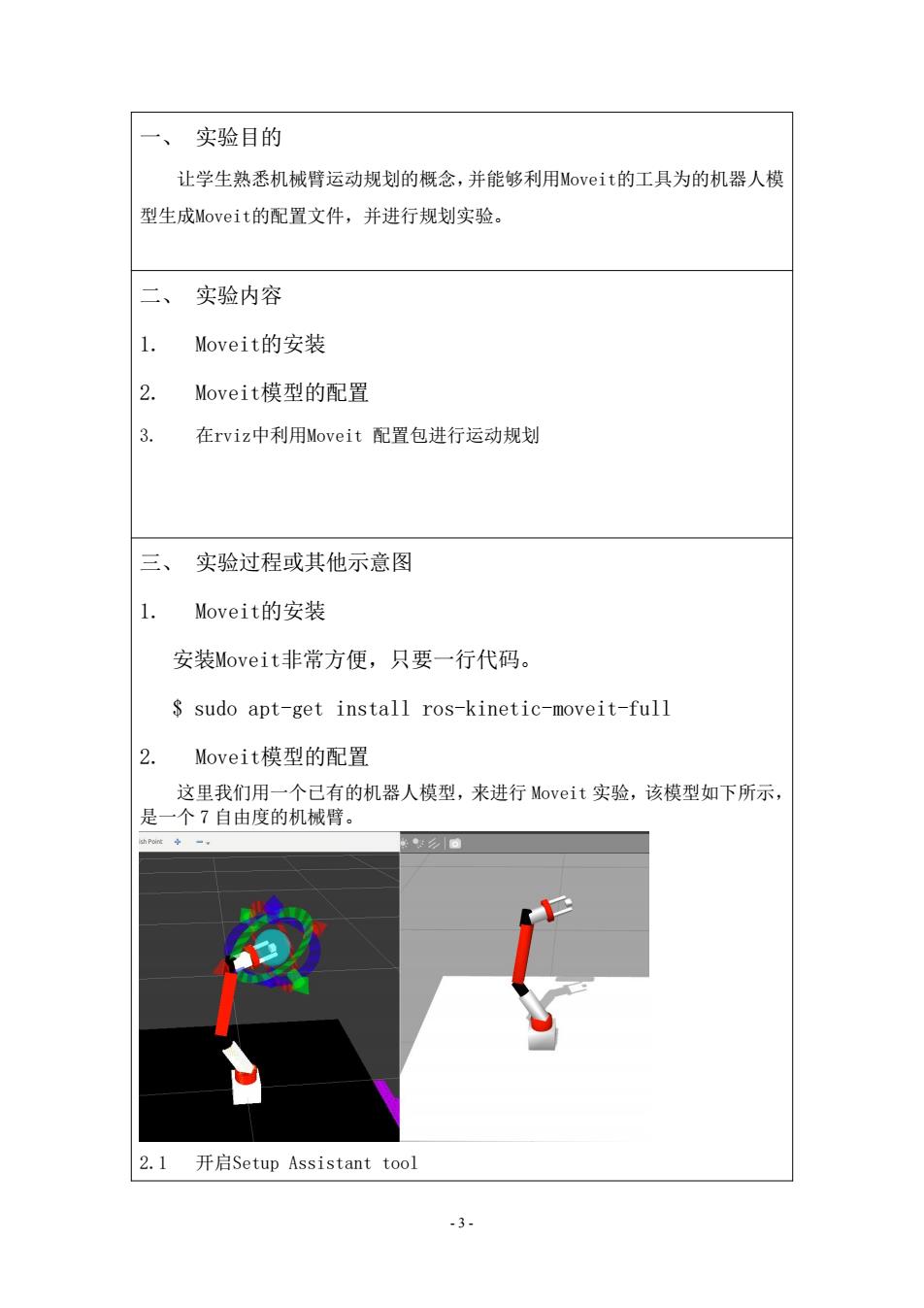
实验目的 让学生熟悉机械臂运动规划的概念,并能够利用Moveit的工具为的机器人模 型生成Moveit的配置文件,并进行规划实验。 二、 实验内容 1. Moveit的安装 2. Moveit模型的配置 3. 在rviz中利用Moveit配置包进行运动规划 三、 实验过程或其他示意图 1. Moveit的安装 安装Moveit非常方便,只要一行代码。 sudo apt-get install ros-kinetic-moveit-full 2. Moveit模型的配置 这里我们用一个已有的机器人模型,来进行Moveit实验,该模型如下所示, 是一个7自由度的机械臂。 hPet。 2.1开启Setup Assistant tool -3.- 3 - 一、 实验目的 让学生熟悉机械臂运动规划的概念,并能够利用Moveit的工具为的机器人模 型生成Moveit的配置文件,并进行规划实验。 二、 实验内容 1. Moveit的安装 2. Moveit模型的配置 3. 在rviz中利用Moveit 配置包进行运动规划 三、 实验过程或其他示意图 1. Moveit的安装 安装Moveit非常方便,只要一行代码。 $ sudo apt-get install ros-kinetic-moveit-full 2. Moveit模型的配置 这里我们用一个已有的机器人模型,来进行 Moveit 实验,该模型如下所示, 是一个 7 自由度的机械臂。 2.1 开启Setup Assistant tool