正在加载图片...
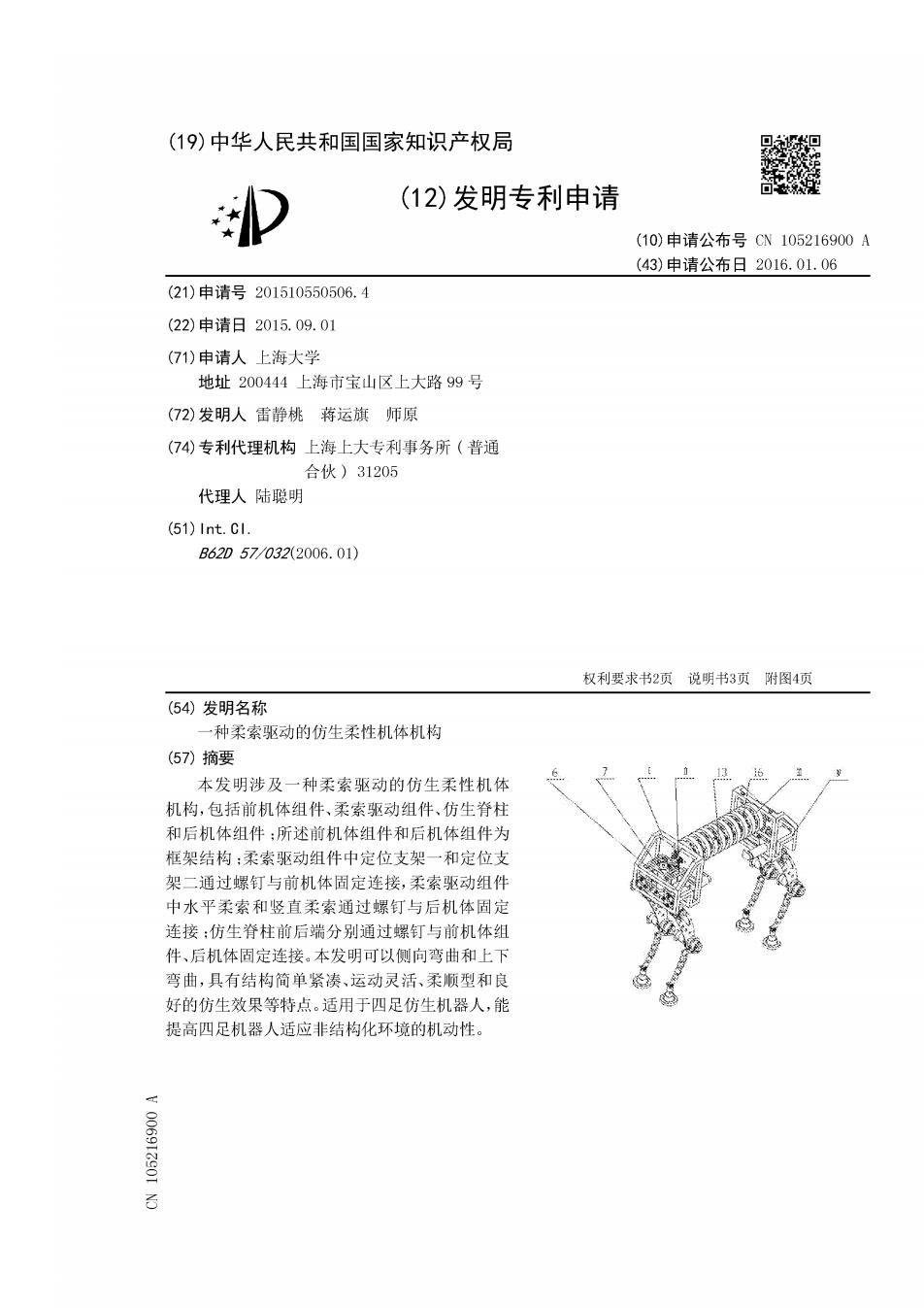
(19)中华人民共和国国家知识产权局 ▣张▣ (12)发明专利申请 (10)申请公布号CN105216900A (43)申请公布日2016.01.06 (21)申请号201510550506.4 (22)申请日2015.09.01 (71)申请人上海大学 地址200444上海市宝山区上大路99号 (72)发明人雷静桃蒋运旗师原 (74)专利代理机构上海上大专利事务所(普通 合伙)31205 代理人陆聪明 (51)1nt.Cl. B62D571032(2006.01) 权利要求书2页说明书3页附图4页 (54)发明名称 一种柔索驱动的仿生柔性机体机构 (57)摘要 本发明涉及一种柔索驱动的仿生柔性机体 机构,包括前机体组件、柔索驱动组件、仿生脊柱 和后机体组件:所述前机体组件和后机体组件为 框架结构:柔索驱动组件中定位支架一和定位支 架二通过螺钉与前机体固定连接,柔索驱动组件 中水平柔索和竖直柔索通过螺钉与后机体固定 连接:仿生脊柱前后端分别通过螺钉与前机体组 件、后机体固定连接。本发明可以侧向弯曲和上下 弯曲,具有结构简单紧凑、运动灵活、柔顺型和良 好的仿生效果等特点。适用于四足仿生机器人,能 提高四足机器人适应非结构化环境的机动性。 100697250真N