正在加载图片...
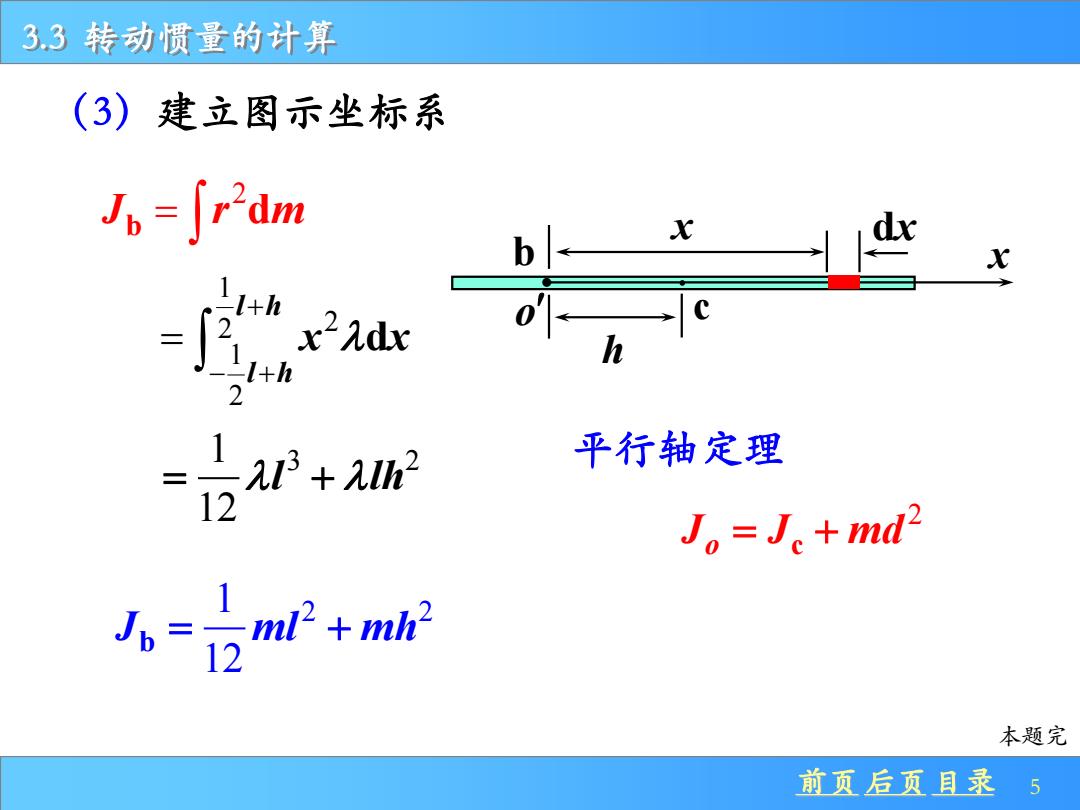
3,3转动惯量的计算 (3)建立图示坐标系 J=frdm X X L1+h x2Adx 1+h 1+元h2 平行轴定理 1 J。=Jc+md2 Jo-aml2+m2 12 本题完 前页后页目录5前页 后页 目录 5 3.3 转动惯量的计算 (3)建立图示坐标系 2 J r m b = d 1 2 2 1 2 d l h l h x x + − + = 1 3 2 12 = + l lh 1 2 2 12 b J ml mh = + 平行轴定理 2 o c J J md = + 本题完 h b x x dx o c