正在加载图片...
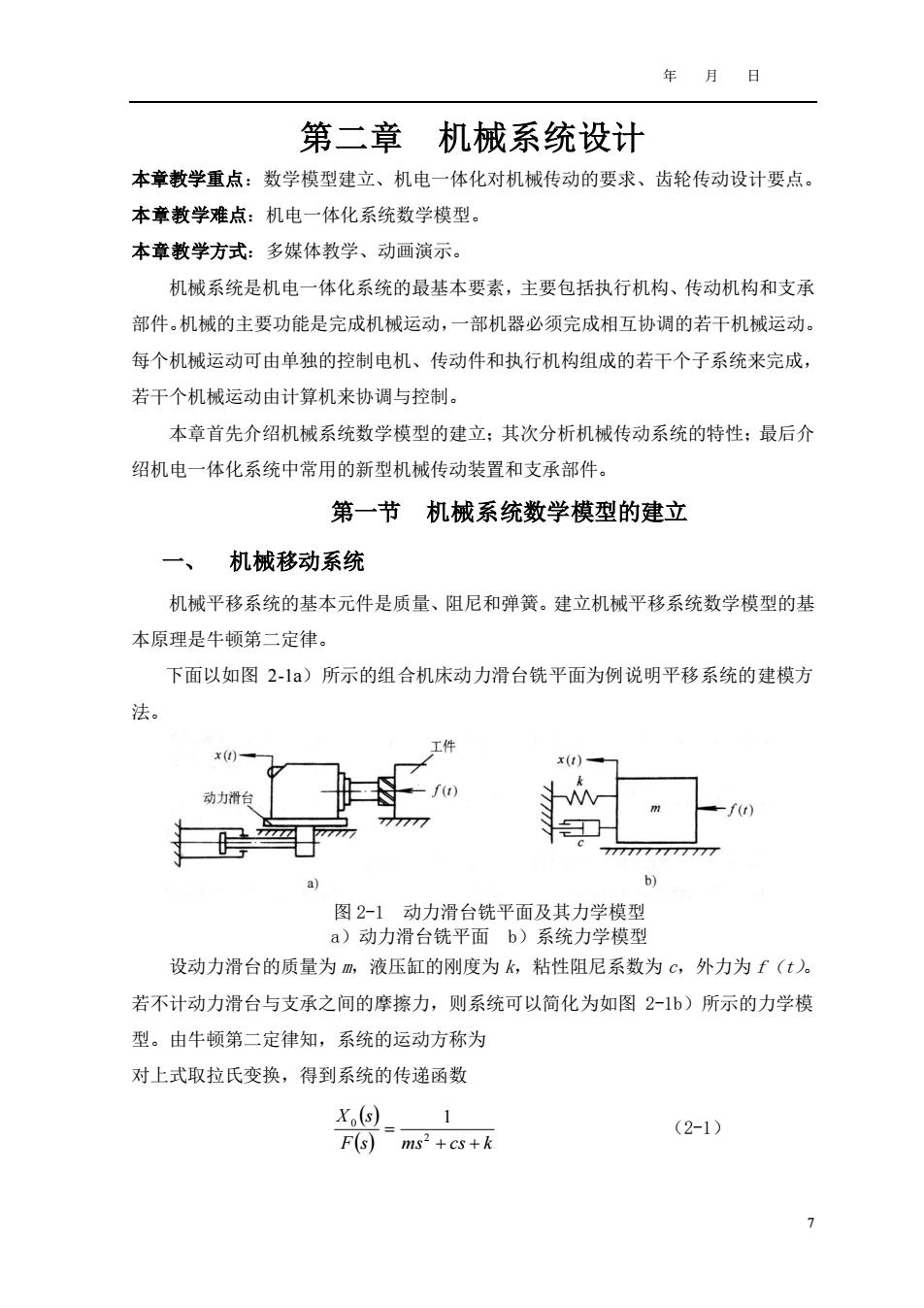
年月日 第二章机械系统设计 本章教学重点:数学模型建立、机电一体化对机械传动的要求、齿轮传动设计要点。 本章教学难点:机电一体化系统数学模型。 本章教学方式:多媒体教学、动画演示。 机械系统是机电一体化系统的最基本要素,主要包括执行机构、传动机构和支承 部件。机械的主要功能是完成机械运动,一部机器必须完成相互协调的若干机械运动。 每个机械运动可由单独的控制电机、传动件和执行机构组成的若干个子系统来完成, 若干个机械运动由计算机来协调与控制。 本章首先介绍机械系统数学模型的建立:其次分析机械传动系统的特性:最后介 绍机电一体化系统中常用的新型机械传动装置和支承部件。 第一节机械系统数学模型的建立 一、机械移动系统 机械平移系统的基本元件是质量、阻尼和弹簧。建立机械平移系统数学模型的基 本原理是牛顿第二定律。 下面以如图2-1a)所示的组合机床动力滑台铣平面为例说明平移系统的建模方 法。 x(0 工件 动力清台 f -f( 777777777 a) 图2-1动力滑台铣平面及其力学模型 a)动力滑台铣平面b)系统力学模型 设动力滑台的质量为m,液压缸的刚度为k,粘性阻尼系数为c,外力为「(t。 若不计动力滑台与支承之间的摩擦力,则系统可以简化为如图2-1)所示的力学模 型。由牛顿第二定律知,系统的运动方称为 对上式取拉氏变换,得到系统的传递函数 x.(s) 1 (2-1) F(s)ms2+cs+k年 月 日 7 第二章 机械系统设计 本章教学重点:数学模型建立、机电一体化对机械传动的要求、齿轮传动设计要点。 本章教学难点:机电一体化系统数学模型。 本章教学方式:多媒体教学、动画演示。 机械系统是机电一体化系统的最基本要素,主要包括执行机构、传动机构和支承 部件。机械的主要功能是完成机械运动,一部机器必须完成相互协调的若干机械运动。 每个机械运动可由单独的控制电机、传动件和执行机构组成的若干个子系统来完成, 若干个机械运动由计算机来协调与控制。 本章首先介绍机械系统数学模型的建立;其次分析机械传动系统的特性;最后介 绍机电一体化系统中常用的新型机械传动装置和支承部件。 第一节 机械系统数学模型的建立 一、 机械移动系统 机械平移系统的基本元件是质量、阻尼和弹簧。建立机械平移系统数学模型的基 本原理是牛顿第二定律。 下面以如图 2-1a)所示的组合机床动力滑台铣平面为例说明平移系统的建模方 法。 图 2-1 动力滑台铣平面及其力学模型 a)动力滑台铣平面 b)系统力学模型 设动力滑台的质量为 m,液压缸的刚度为 k,粘性阻尼系数为 c,外力为 f(t)。 若不计动力滑台与支承之间的摩擦力,则系统可以简化为如图 2-1b)所示的力学模 型。由牛顿第二定律知,系统的运动方称为 对上式取拉氏变换,得到系统的传递函数 ( ) F(s) ms cs k X s + + = 2 0 1 (2-1)