正在加载图片...
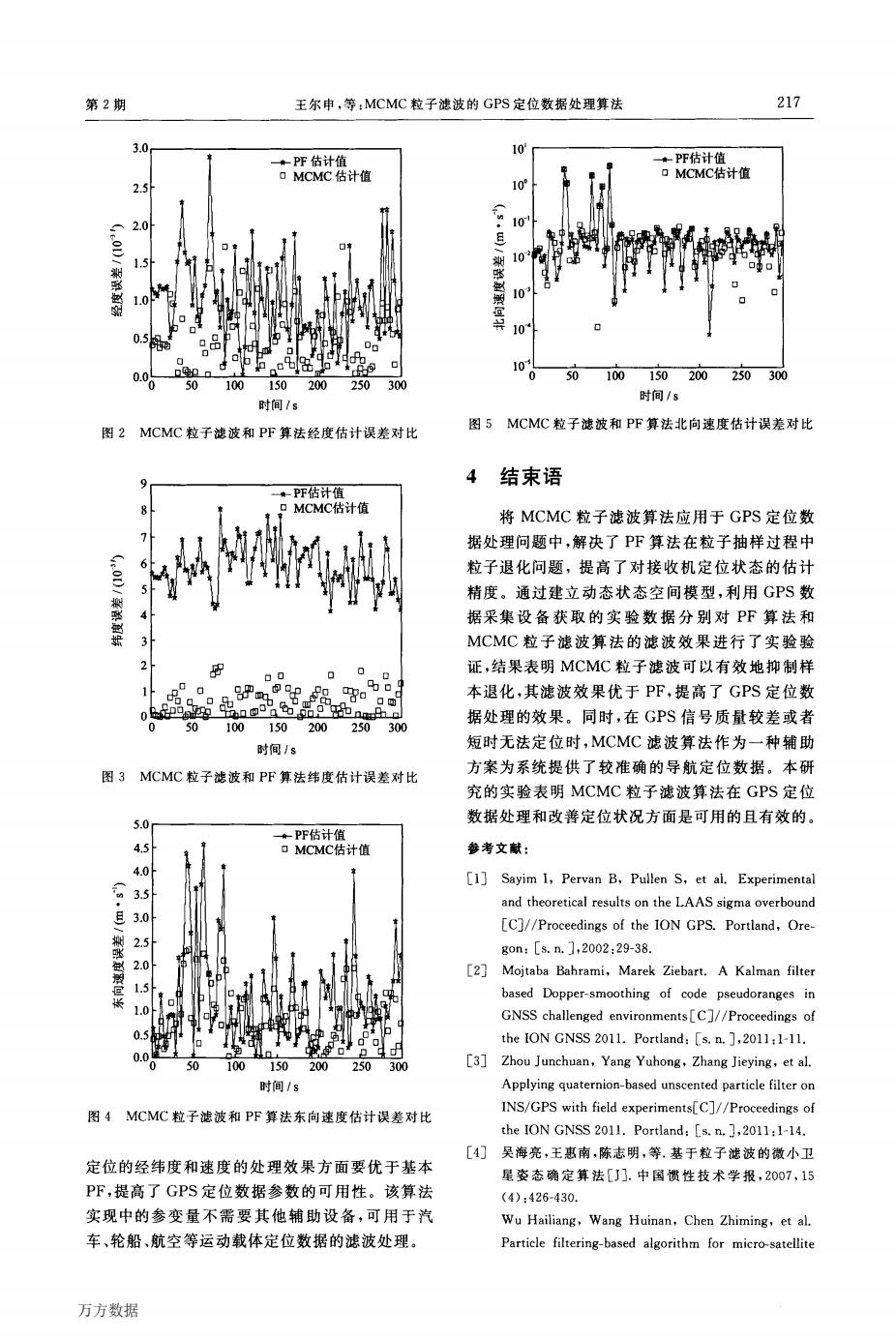
第2期 王尔申,等:MCMC粒子滤波的GPS定位数据处理算法 217 3.0 10 南P℉估计值 ★P℉估计值 MCMC估计值 口MCMC估计值 2.5 2.0 10 1.5 o 1.0 10 10 0.5 10 100 150200250300 0 50 100 150200 250 300 时间/s 时间/s 图5 MCMC粒子滤波和PF算法北向速度估计误差对比 图2 MCMC粒子滤波和PF算法经度估计误差对比 4 结束语 P℉估计值 MCMC估计值 将MCMC粒子滤波算法应用于GPS定位数 据处理问题中,解决了P℉算法在粒子抽样过程中 粒子退化问题,提高了对接收机定位状态的估计 精度。通过建立动态状态空间模型,利用GPS数 据采集设备获取的实验数据分别对PF算法和 MCMC粒子滤波算法的滤波效果进行了实验验 证,结果表明MCMC粒子滤波可以有效地抑制样 00 0 0 1 8 b口 本退化,其滤波效果优于P℉,提高了GPS定位数 据处理的效果。同时,在GPS信号质量较差或者 0 50100150200250300 时间/s 短时无法定位时,MCMC滤波算法作为一种辅助 图3 方案为系统提供了较准确的导航定位数据。本研 MCMC粒子滤波和PF算法纬度估计误差对比 究的实验表明MCMC粒子滤波算法在GPS定位 数据处理和改善定位状况方面是可用的且有效的。 5.0 ★PF估计值 MCMC估计值 参考文献: [1]Sayim I,Pervan B,Pullen S,et al.Experimental 35 and theoretical results on the LAAS sigma overbound 0501510 [C]//Proceedings of the ION GPS.Portland,Ore- gon:[s.n.,2002:29-38. [2] Mojtaba Bahrami,Marek Ziebart.A Kalman filter based Dopper-smoothing of code pseudoranges in GNSS challenged environments[C]//Proceedings of the ION GNSS 2011.Portland:[s.n.]2011:1-11. 0.0 50 100 150 200 250 300 [3] Zhou Junchuan,Yang Yuhong,Zhang Jieying,et al. 时间/s Applying quaternion-based unscented particle filter on 图4MCMC粒子滤波和PF算法东向速度估计误差对比 INS/GPS with field experiments[C]//Proceedings of the ION GNSS 2011.Portland:[s.n.],2011:1-14. [4] 吴海亮,王惠南,陈志明,等.基于粒子滤波的微小卫 定位的经纬度和速度的处理效果方面要优于基本 星姿态确定算法[」].中国惯性技术学报,2007,15 P℉,提高了GPS定位数据参数的可用性。该算法 (4):426-430. 实现中的参变量不需要其他辅助设备,可用于汽 Wu Hailiang,Wang Huinan,Chen Zhiming,et al. 车、轮船、航空等运动载体定位数据的滤波处理。 Particle filtering-based algorithm for micro-satellite 万方数据第2期 王尔申,等:MCMC粒子滤波的GPS定位数据处理算法 217 ● b o \ jIl|j 媸 蜊 骊 时间/s f ? 邑\ j{llj 媸 魁 蝴 ·匠 菩 时间/s 图2 McMc粒子滤波和PF算法经度估计误差对比 图5 McMc粒子滤波和PF算法北向速度估计误差对比 ●n 2 、一\ j|{1j 账 {趟 婚 时间/8 图3 MCMC粒子滤波和PF算法纬度估计误差对比 f ? 邑\ jll|j 账 越 制 ·叵 长 时间/s 图4 MCMC粒子滤波和PF算法东向速度估计误差对比 定位的经纬度和速度的处理效果方面要优于基本 PF,提高了GPS定位数据参数的可用性。该算法 实现中的参变量不需要其他辅助设备,可用于汽 车、轮船、航空等运动载体定位数据的滤波处理。 4 结束语 将MCMC粒子滤波算法应用于GPS定位数 据处理问题中,解决了PF算法在粒子抽样过程中 粒子退化问题,提高了对接收机定位状态的估计 精度。通过建立动态状态空间模型,利用GPS数 据采集设备获取的实验数据分别对PF算法和 MCMC粒子滤波算法的滤波效果进行了实验验 证,结果表明MCMC粒子滤波可以有效地抑制样 本退化,其滤波效果优于PF,提高了GPS定位数 据处理的效果。同时,在GPS信号质量较差或者 短时无法定位时,MCMC滤波算法作为一种辅助 方案为系统提供了较准确的导航定位数据。本研 究的实验表明MCMC粒子滤波算法在GPS定位 数据处理和改善定位状况方面是可用的且有效的。 参考文献: [1] [2] [3] F4] Sayim I,Pervan B。Pullen S,et a1.Experimental and theoretical results on the LAAS sigma overbound [c]//Proceedings of the ION GPS.Portland,Ore— gon:Is.n.],2002:29—38. Moj taba Bahrami,Marek Ziebart.A Kalman filter based Dopper-smoothing of code pseudoranges in GNSS challenged environments[c]//Proceedings of the ION GNSS 2011.Portland:Is.n.],2011:卜11. Zhou Junchuan,Yang Yuhong,Zhang Jieying,et a1. Applying quaternion—based unscented particle filter on INS/GPS with field experimentsEC]//Proceedings of the ION GNSS 2011.Portland:Is.n.],2011:卜14. 吴海亮,王惠南,陈志明,等.基于粒子滤波的微小卫 星姿态确定算法[J].中国惯性技术学报,2007,15 (4):426—430. Wu Hailiang,Wang Huinan,Chen Zhiming,et a1. Particle filtering-based algorithm for micro-satellite 万方数据