正在加载图片...
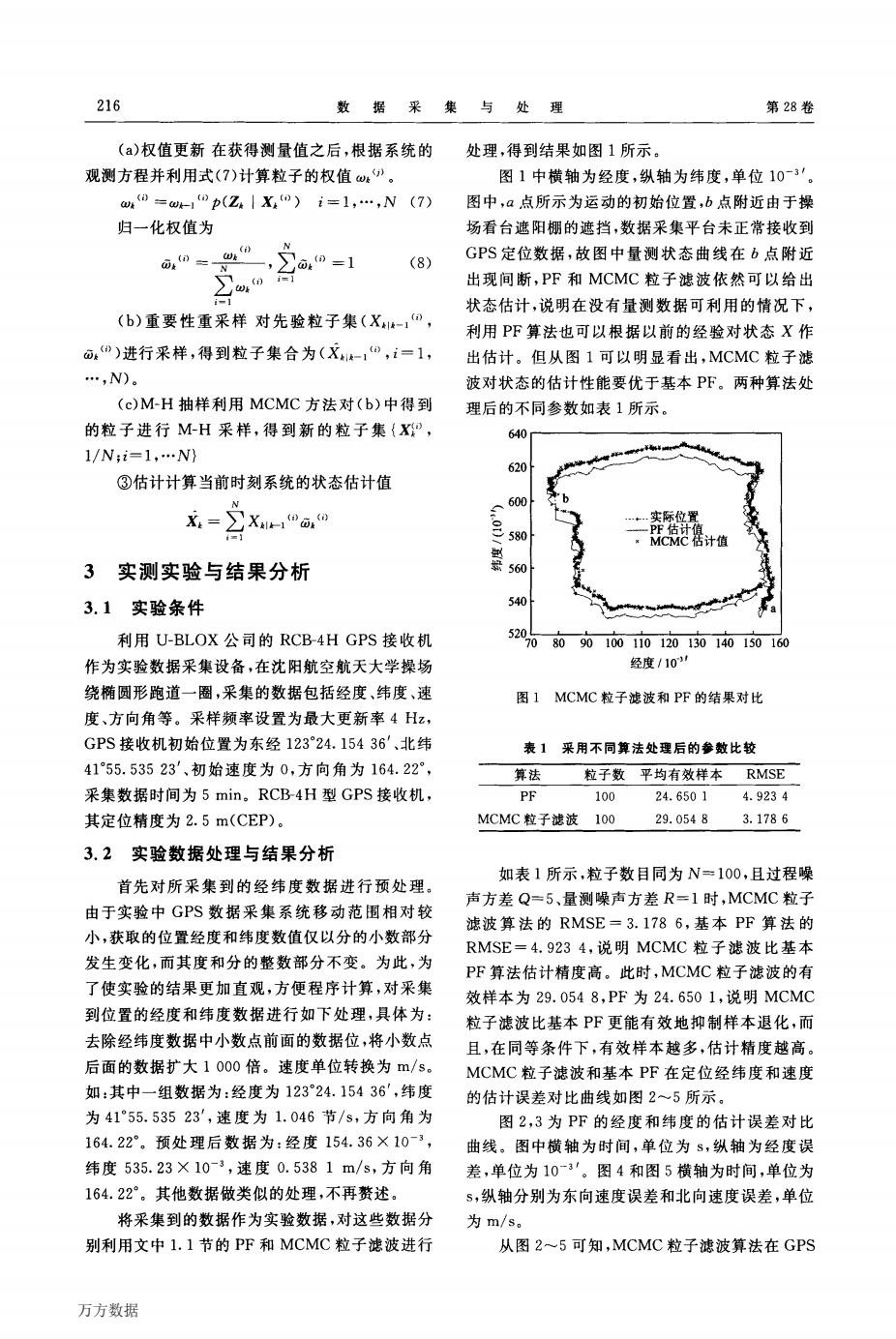
216 数据采集与处理 第28卷 (a)权值更新在获得测量值之后,根据系统的 处理,得到结果如图1所示。 观测方程并利用式(7)计算粒子的权值)。 图1中横轴为经度,纵轴为纬度,单位10-3′。 w4⊙=w-op(Z4|Xo)i=1,…,N(7) 图中,a点所示为运动的初始位置,b点附近由于操 归一化权值为 场看台遮阳棚的遮挡,数据采集平台未正常接收到 N (8) GPS定位数据,故图中量测状态曲线在b点附近 ∑台 出现间断,PF和MCMC粒子滤波依然可以给出 状态估计,说明在没有量测数据可利用的情况下, (b)重要性重采样对先验粒子集(X-1®, 利用P℉算法也可以根据以前的经验对状态X作 而。)进行采样,得到粒子集合为(X-1⑧,i=1, 出估计。但从图1可以明显看出,MCMC粒子滤 …,N)。 波对状态的估计性能要优于基本PF。两种算法处 (c)M-H抽样利用MCMC方法对(b)中得到 理后的不同参数如表1所示。 的粒子进行M-H采样,得到新的粒子集{X, 640 1/N;i=1,…N} 620 ③估计计算当前时刻系统的状态估计值 600 X=∑X-1oa:0 实际位置 580 MCMC活计值 3 实测实验与结果分析 560 3.1实验条件 540 利用U-BLOX公司的RCB4HGPS接收机 520%809010010120130140150160 作为实验数据采集设备,在沈阳航空航天大学操场 经度/103 绕椭圆形跑道一圈,采集的数据包括经度、纬度、速 图1MCMC粒子滤波和PF的结果对比 度、方向角等。采样频率设置为最大更新率4Hz, GPS接收机初始位置为东经123°24.15436'、北纬 表1采用不同算法处理后的参数比较 4155.53523'、初始速度为0,方向角为164.22°, 算法 粒子数平均有效样本RMSE 采集数据时间为5min。RCB4H型GPS接收机, PF 100 24.6501 4.9234 其定位精度为2.5m(CEP)。 MCMC粒子滤波100 29.0548 3.1786 3.2实验数据处理与结果分析 如表1所示,粒子数目同为N=100,且过程噪 首先对所采集到的经纬度数据进行预处理。 声方差Q=5、量测噪声方差R=1时,MCMC粒子 由于实验中GPS数据采集系统移动范围相对较 滤波算法的RMSE=3.1786,基本PF算法的 小,获取的位置经度和纬度数值仅以分的小数部分 RMSE=4.9234,说明MCMC粒子滤波比基本 发生变化,而其度和分的整数部分不变。为此,为 PF算法估计精度高。此时,MCMC粒子滤波的有 了使实验的结果更加直观,方便程序计算,对采集 效样本为29.0548,PF为24.6501,说明MCMC 到位置的经度和纬度数据进行如下处理,具体为: 粒子滤波比基本P℉更能有效地抑制样本退化,而 去除经纬度数据中小数点前面的数据位,将小数点 且,在同等条件下,有效样本越多,估计精度越高。 后面的数据扩大1000倍。速度单位转换为m/s。 MCMC粒子滤波和基本PF在定位经纬度和速度 如:其中一组数据为:经度为123°24.15436',纬度 的估计误差对比曲线如图2~5所示。 为41°55.53523',速度为1.046节/s,方向角为 图2,3为PF的经度和纬度的估计误差对比 164.22°。预处理后数据为:经度154.36×10-3, 曲线。图中横轴为时间,单位为S,纵轴为经度误 纬度535.23×10-3,速度0.5381m/s,方向角 差,单位为10-3'。图4和图5横轴为时间,单位为 164.22°。其他数据做类似的处理,不再赘述。 $,纵轴分别为东向速度误差和北向速度误差,单位 将采集到的数据作为实验数据,对这些数据分 为m/s。 别利用文中1.1节的P℉和MCMC粒子滤波进行 从图2~5可知,MCMC粒子滤波算法在GPS 万方数据216 数 据 采 集 与 处 理 第28卷 (a)权值更新在获得测量值之后,根据系统的 观测方程并利用式(7)计算粒子的权值∞。‘”。 ∞^“’=(Ok-.-l“’夕(厶I墨“’)i=1,…,N(7) 归一化权值为 f订 N 0—3t㈤=},∑05。∽一1(8) ∑∞;“㈡叫 i一1 (b)重要性重采样对先验粒子集(Xm一。“’, 亩t“’)进行采样,得到粒子集合为(X叭一。“’,i一1, …,N)。 (c)M—H抽样利用MCMC方法对(b)中得到 的粒子进行M—H采样,得到新的粒子集{嬲“, 1/N;i一1,…N) ③估计计算当前时刻系统的状态估计值 N X^一≥:溉㈣“h03^“’ i笠1 3实测实验与结果分析 3.1 实验条件 利用U—BLOX公司的RCB_4H GPS接收机 作为实验数据采集设备,在沈阳航空航天大学操场 绕椭圆形跑道一圈,采集的数据包括经度、纬度、速 度、方向角等。采样频率设置为最大更新率4 Hz, GPS接收机初始位置为东经123。24.154 36’、北纬 41。55.535 23’、初始速度为0,方向角为164.22。, 采集数据时间为5 min。RCB-4H型GPS接收机, 其定位精度为2.5 m(CEP)。 3.2实验数据处理与结果分析 首先对所采集到的经纬度数据进行预处理。 由于实验中GPS数据采集系统移动范围相对较 小,获取的位置经度和纬度数值仅以分的小数部分 发生变化,而其度和分的整数部分不变。为此,为 了使实验的结果更加直观,方便程序计算,对采集 到位置的经度和纬度数据进行如下处理,具体为: 去除经纬度数据中小数点前面的数据位,将小数点 后面的数据扩大l 000倍。速度单位转换为m/s。 如:其中一组数据为:经度为123。24.154 367,纬度 为41。55.535 23 7,速度为1.046节/s,方向角为 164.22。。预处理后数据为:经度154.36×10~, 纬度535.23×10~,速度0.538 1 m/s,方向角 164.22。。其他数据做类似的处理,不再赘述。 将采集到的数据作为实验数据,对这些数据分 别利用文中1.1节的PF和MCMC粒子滤波进行 处理,得到结果如图1所示。 图1中横轴为经度,纵轴为纬度,单位101’。 图中,口点所示为运动的初始位置,b点附近由于操 场看台遮阳棚的遮挡,数据采集平台未正常接收到 GPS定位数据,故图中量测状态曲线在b点附近 出现间断,PF和MCMC粒子滤波依然可以给出 状态估计,说明在没有量测数据可利用的情况下, 利用PF算法也可以根据以前的经验对状态X作 出估计。但从图1可以明显看出,MCMC粒子滤 波对状态的估计性能要优于基本PF。两种算法处 理后的不同参数如表1所示。 r、 甲 2 ∑ 划 婚 经度,10-3’ 图1 MCMC粒子滤波和PF的结果对比 表l 采用不同算法处理后的参数比较 如表1所示,粒子数目同为N=100,且过程噪 声方差Q=5、量测噪声方差R一1时,MCMC粒子 滤波算法的RMSE一3.178 6,基本PF算法的 RMSE一4.923 4,说明MCMC粒子滤波比基本 PF算法估计精度高。此时,MCMC粒子滤波的有 效样本为29.054 8,PF为24.650 1,说明MCMC 粒子滤波比基本PF更能有效地抑制样本退化,而 且,在同等条件下,有效样本越多,估计精度越高。 MCMC粒子滤波和基本PF在定位经纬度和速度 的估计误差对比曲线如图2~5所示。 图2,3为PF的经度和纬度的估计误差对比 曲线。图中横轴为时间,单位为S,纵轴为经度误 差,单位为10_’。图4和图5横轴为时间,单位为 S,纵轴分别为东向速度误差和北向速度误差,单位 为m/s。 从图2~5可知,MCMC粒子滤波算法在GPS 万方数据