正在加载图片...
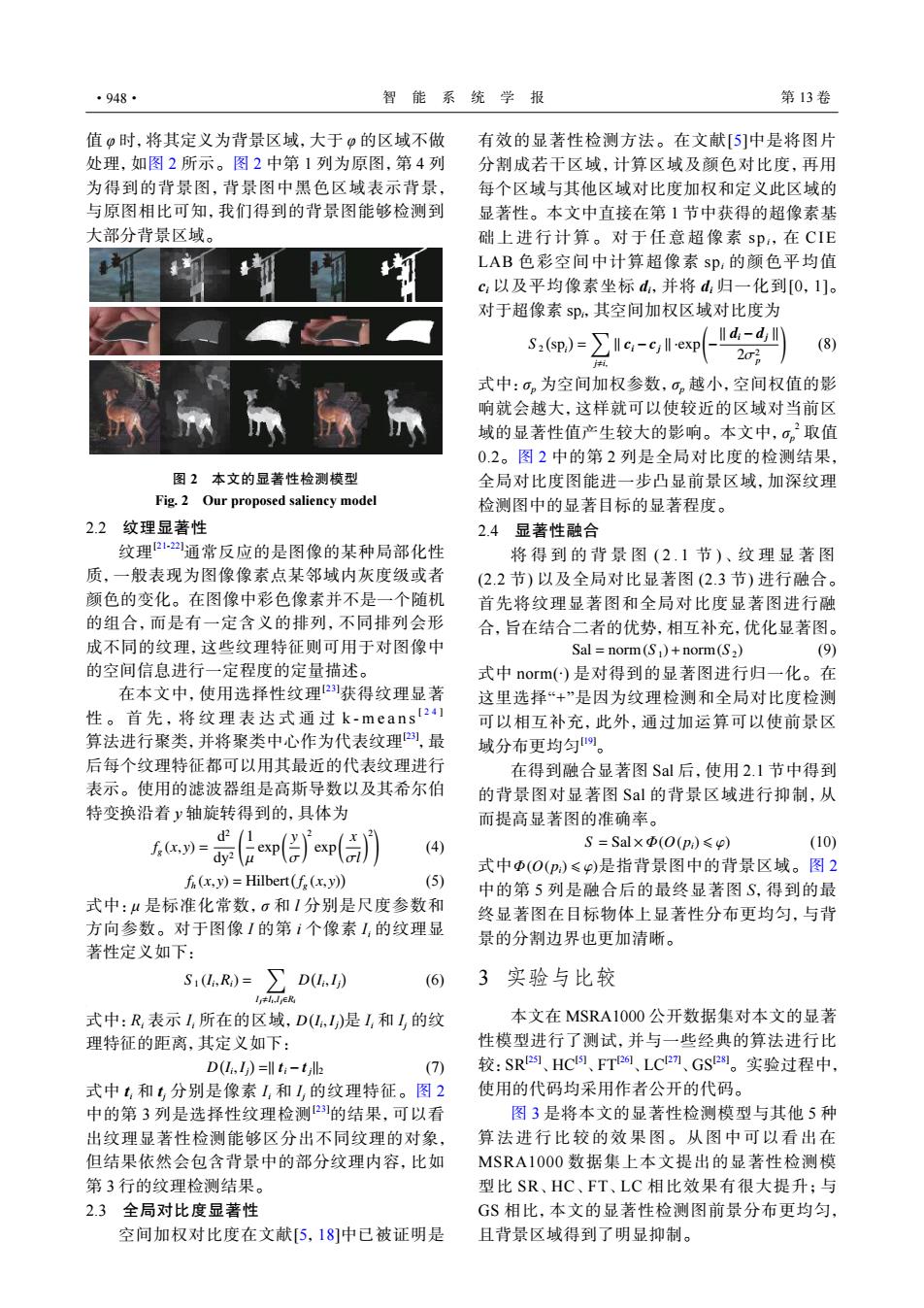
·948· 智能系统学报 第13卷 值9时,将其定义为背景区域,大于0的区域不做 有效的显著性检测方法。在文献[5]中是将图片 处理,如图2所示。图2中第1列为原图,第4列 分割成若干区域,计算区域及颜色对比度,再用 为得到的背景图,背景图中黑色区域表示背景, 每个区域与其他区域对比度加权和定义此区域的 与原图相比可知,我们得到的背景图能够检测到 显著性。本文中直接在第1节中获得的超像素基 大部分背景区域。 础上进行计算。对于任意超像素sp,在CIE LAB色彩空间中计算超像素sp:的颜色平均值 c以及平均像素坐标d,并将d:归一化到[0,1]。 对于超像素sp,其空间加权区域对比度为 S2(sp,)=∑lc-c‖exp ld-d 、22 (8) 式中:o。为空间加权参数,O,越小,空间权值的影 响就会越大,这样就可以使较近的区域对当前区 域的显著性值产生较大的影响。本文中,σ,2取值 0.2。图2中的第2列是全局对比度的检测结果, 图2本文的显著性检测模型 全局对比度图能进一步凸显前景区域,加深纹理 Fig.2 Our proposed saliency model 检测图中的显著目标的显著程度。 2.2纹理显著性 2.4显著性融合 纹理2-2通常反应的是图像的某种局部化性 将得到的背景图(2.1节)、纹理显著图 质,一般表现为图像像素点某邻域内灰度级或者 (2.2节)以及全局对比显著图(2.3节)进行融合。 颜色的变化。在图像中彩色像素并不是一个随机 首先将纹理显著图和全局对比度显著图进行融 的组合,而是有一定含义的排列,不同排列会形 合,旨在结合二者的优势,相互补充,优化显著图。 成不同的纹理,这些纹理特征则可用于对图像中 Sal norm(S)+norm(S2) (9) 的空间信息进行一定程度的定量描述。 式中norm(~)是对得到的显著图进行归一化。在 在本文中,使用选择性纹理2获得纹理显著 这里选择“+”是因为纹理检测和全局对比度检测 性。首先,将纹理表达式通过k-meanst2 可以相互补充,此外,通过加运算可以使前景区 算法进行聚类,并将聚类中心作为代表纹理),最 域分布更均匀。 后每个纹理特征都可以用其最近的代表纹理进行 在得到融合显著图Sal后,使用2.1节中得到 表示。使用的滤波器组是高斯导数以及其希尔伯 的背景图对显著图Sal的背景区域进行抑制,从 特变换沿着y轴旋转得到的,具体为 而提高显著图的准确率。 无c0= (4) S=Sal×Φ(0(p)≤p) (10) 式中Φ(O(p)≤p)是指背景图中的背景区域。图2 f (x,y)Hilbert(f(x,y)) (5) 中的第5列是融合后的最终显著图S,得到的最 式中:4是标准化常数,σ和I分别是尺度参数和 终显著图在目标物体上显著性分布更均匀,与背 方向参数。对于图像I的第i个像素L,的纹理显 景的分割边界也更加清晰。 著性定义如下: S1(L,R)= ∑ D(I,) (6) 3实验与比较 Ifth!/ER 式中:R表示I所在的区域,D(I,I)是I,和I的纹 本文在MSRA1000公开数据集对本文的显著 理特征的距离,其定义如下: 性模型进行了测试,并与一些经典的算法进行比 D(I,I)=ll ti-till2 (7) 较:SR、HC、FT2、LC7、GS2。实验过程中, 式中t,和t分别是像素,和L,的纹理特征。图2 使用的代码均采用作者公开的代码。 中的第3列是选择性纹理检测2的结果,可以看 图3是将本文的显著性检测模型与其他5种 出纹理显著性检测能够区分出不同纹理的对象, 算法进行比较的效果图。从图中可以看出在 但结果依然会包含背景中的部分纹理内容,比如 MSRA1000数据集上本文提出的显著性检测模 第3行的纹理检测结果。 型比SR、HC、FT、LC相比效果有很大提升;与 2.3全局对比度显著性 G$相比,本文的显著性检测图前景分布更均匀, 空间加权对比度在文献[5,18]中已被证明是 且背景区域得到了明显抑制。值 φ 时,将其定义为背景区域,大于 φ 的区域不做 处理,如图 2 所示。图 2 中第 1 列为原图,第 4 列 为得到的背景图,背景图中黑色区域表示背景, 与原图相比可知,我们得到的背景图能够检测到 大部分背景区域。 2.2 纹理显著性 纹理[21-22]通常反应的是图像的某种局部化性 质,一般表现为图像像素点某邻域内灰度级或者 颜色的变化。在图像中彩色像素并不是一个随机 的组合,而是有一定含义的排列,不同排列会形 成不同的纹理,这些纹理特征则可用于对图像中 的空间信息进行一定程度的定量描述。 在本文中,使用选择性纹理[23]获得纹理显著 性。首先,将纹理表达式通 过 k-means[ 2 4 ] 算法进行聚类,并将聚类中心作为代表纹理[23] ,最 后每个纹理特征都可以用其最近的代表纹理进行 表示。使用的滤波器组是高斯导数以及其希尔伯 特变换沿着 y 轴旋转得到的,具体为 fg (x, y) = d 2 dy2 ( 1 µ exp( y σ )2 exp( x σl )2 ) (4) fh (x, y) = Hilbert( fg (x, y) ) (5) 式中:μ 是标准化常数,σ 和 l 分别是尺度参数和 方向参数。对于图像 I 的第 i 个像素 Ii 的纹理显 著性定义如下: S 1 (Ii ,Ri) = ∑ Ij,Ii,Ij∈Ri D ( Ii ,Ij ) (6) D ( Ii ,Ij ) 式中:Ri 表示 Ii 所在的区域, 是 Ii 和 Ij 的纹 理特征的距离,其定义如下: D ( Ii ,Ij ) =∥ ti − t j∥2 (7) 式中 ti 和 tj 分别是像素 Ii 和 Ij 的纹理特征。图 2 中的第 3 列是选择性纹理检测[23]的结果,可以看 出纹理显著性检测能够区分出不同纹理的对象, 但结果依然会包含背景中的部分纹理内容,比如 第 3 行的纹理检测结果。 2.3 全局对比度显著性 空间加权对比度在文献[5,18]中已被证明是 有效的显著性检测方法。在文献[5]中是将图片 分割成若干区域,计算区域及颜色对比度,再用 每个区域与其他区域对比度加权和定义此区域的 显著性。本文中直接在第 1 节中获得的超像素基 础上进行计算。对于任意超像 素 spi, 在 CIE LAB 色彩空间中计算超像素 spi 的颜色平均值 ci 以及平均像素坐标 di,并将 di 归一化到[0,1]。 对于超像素 spi,其空间加权区域对比度为 S 2 ( spi ) = ∑ j,i, ∥ ci − cj ∥ ·exp( − ∥ di − dj ∥ 2σ2 p ) (8) 式中:σp 为空间加权参数,σp 越小,空间权值的影 响就会越大,这样就可以使较近的区域对当前区 域的显著性值产生较大的影响。本文中,σp 2 取值 0.2。图 2 中的第 2 列是全局对比度的检测结果, 全局对比度图能进一步凸显前景区域,加深纹理 检测图中的显著目标的显著程度。 2.4 显著性融合 将得到的背景 图 (2. 1 节 ) 、纹理显著 图 (2.2 节) 以及全局对比显著图 (2.3 节) 进行融合。 首先将纹理显著图和全局对比度显著图进行融 合,旨在结合二者的优势,相互补充,优化显著图。 Sal = norm(S 1)+norm(S 2) (9) 式中 norm(∙) 是对得到的显著图进行归一化。在 这里选择“+”是因为纹理检测和全局对比度检测 可以相互补充,此外,通过加运算可以使前景区 域分布更均匀[19]。 在得到融合显著图 Sal 后,使用 2.1 节中得到 的背景图对显著图 Sal 的背景区域进行抑制,从 而提高显著图的准确率。 S = Sal×Φ(O(pi) ⩽ φ) (10) 式中 Φ(O(pi) ⩽ φ) 是指背景图中的背景区域。图 2 中的第 5 列是融合后的最终显著图 S,得到的最 终显著图在目标物体上显著性分布更均匀,与背 景的分割边界也更加清晰。 3 实验与比较 本文在 MSRA1000 公开数据集对本文的显著 性模型进行了测试,并与一些经典的算法进行比 较:SR[25] 、HC[5] 、FT[26] 、LC[27] 、GS[28]。实验过程中, 使用的代码均采用作者公开的代码。 图 3 是将本文的显著性检测模型与其他 5 种 算法进行比较的效果图。从图中可以看出在 MSRA1000 数据集上本文提出的显著性检测模 型比 SR、HC、FT、LC 相比效果有很大提升;与 GS 相比,本文的显著性检测图前景分布更均匀, 且背景区域得到了明显抑制。 图 2 本文的显著性检测模型 Fig. 2 Our proposed saliency model ·948· 智 能 系 统 学 报 第 13 卷