正在加载图片...
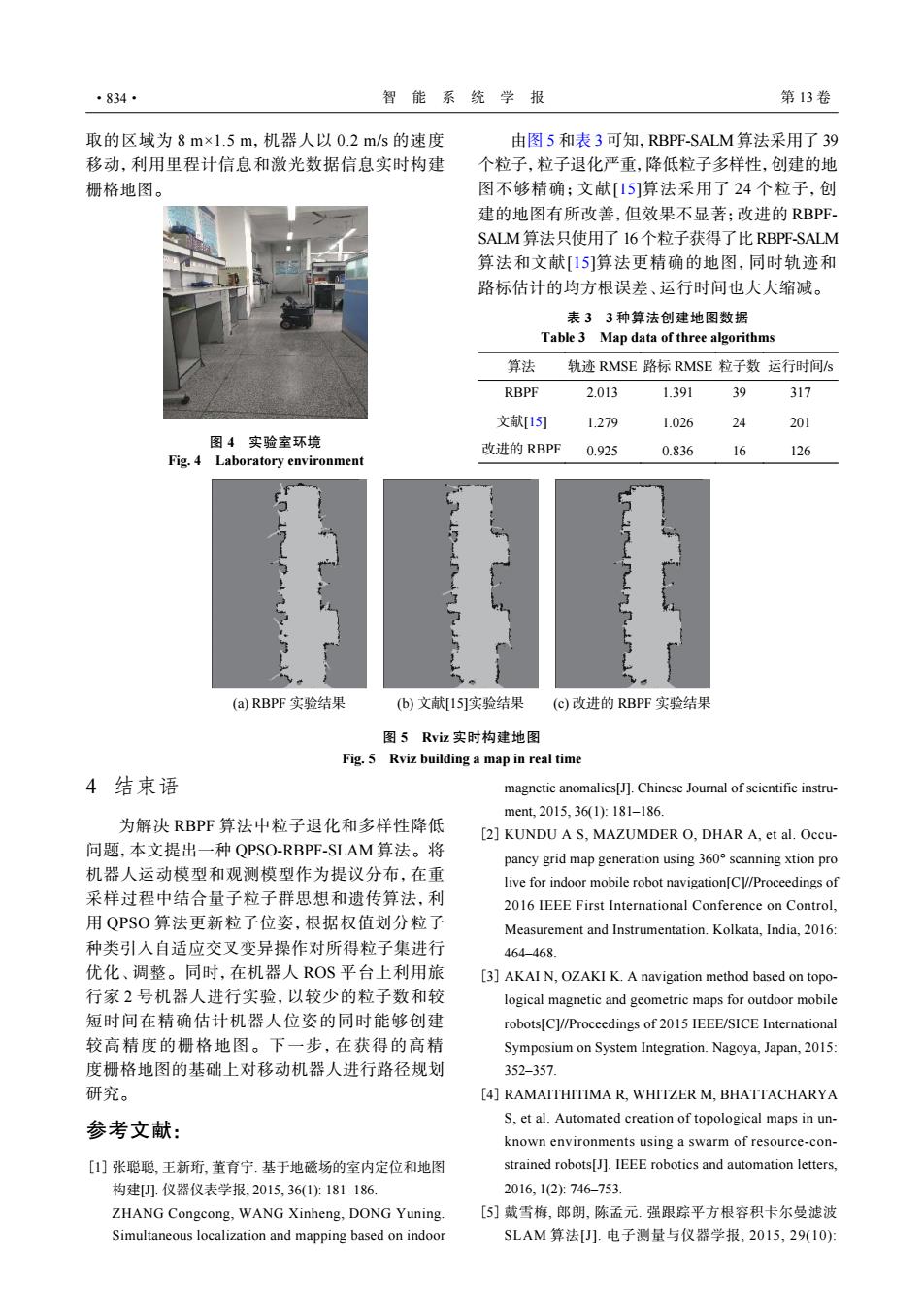
·834· 智能系统学报 第13卷 取的区域为8m×1.5m,机器人以0.2m/s的速度 由图5和表3可知,RBPF-SALM算法采用了39 移动,利用里程计信息和激光数据信息实时构建 个粒子,粒子退化严重,降低粒子多样性,创建的地 栅格地图。 图不够精确;文献[15]算法采用了24个粒子,创 建的地图有所改善,但效果不显著;改进的RBPF- SALM算法只使用了16个粒子获得了比RBPF-SALM 算法和文献[15]算法更精确的地图,同时轨迹和 路标估计的均方根误差、运行时间也大大缩减。 表33种算法创建地图数据 Table 3 Map data of three algorithms 算法 轨迹RMSE路标RMSE粒子数运行时间s RBPF 2.013 1.391 39 317 文献[15) 1.279 1.026 24 201 图4实验室环境 改进的RBPF 0.925 0.836 16 126 Fig.4 Laboratory environment (a)RBPF实验结果 (b)文献[15]实验结果 (©)改进的RBPF实验结果 图5Rviz实时构建地图 Fig.5 Rviz building a map in real time 4结束语 magnetic anomalies[J].Chinese Journal of scientific instru- ment,2015,36(1):181-186 为解决RBPF算法中粒子退化和多样性降低 [2]KUNDU A S.MAZUMDER O,DHAR A,et al.Occu- 问题,本文提出一种QPSO-RBPF-SLAM算法。将 pancy grid map generation using 360 scanning xtion pro 机器人运动模型和观测模型作为提议分布,在重 live for indoor mobile robot navigation[Cl//Proceedings of 采样过程中结合量子粒子群思想和遗传算法,利 2016 IEEE First International Conference on Control, 用QPSO算法更新粒子位姿,根据权值划分粒子 Measurement and Instrumentation.Kolkata,India,2016: 种类引入自适应交叉变异操作对所得粒子集进行 464-468. 优化、调整。同时,在机器人ROS平台上利用旅 [3]AKAI N,OZAKI K.A navigation method based on topo- 行家2号机器人进行实验,以较少的粒子数和较 logical magnetic and geometric maps for outdoor mobile 短时间在精确估计机器人位姿的同时能够创建 robots[C]//Proceedings of 2015 IEEE/SICE International 较高精度的栅格地图。下一步,在获得的高精 Symposium on System Integration.Nagoya,Japan,2015: 度栅格地图的基础上对移动机器人进行路径规划 352-357 研究。 [4]RAMAITHITIMA R,WHITZER M,BHATTACHARYA 参考文献: S,et al.Automated creation of topological maps in un- known environments using a swarm of resource-con- [1]张聪聪王新珩,董育宁.基于地磁场的室内定位和地图 strained robots[J].IEEE robotics and automation letters, 构建0.仪器仪表学报,2015,36(1):181-186. 2016,1(2):746-753. ZHANG Congcong,WANG Xinheng,DONG Yuning. [5]戴雪梅,郎朗,陈孟元.强跟踪平方根容积卡尔曼滤波 Simultaneous localization and mapping based on indoor SLAM算法[J].电子测量与仪器学报,2015,29(10):取的区域为 8 m×1.5 m,机器人以 0.2 m/s 的速度 移动,利用里程计信息和激光数据信息实时构建 栅格地图。 图 4 实验室环境 Fig. 4 Laboratory environment 由图 5 和表 3 可知,RBPF-SALM 算法采用了 39 个粒子,粒子退化严重,降低粒子多样性,创建的地 图不够精确;文献[15]算法采用了 24 个粒子,创 建的地图有所改善,但效果不显著;改进的 RBPFSALM 算法只使用了 16 个粒子获得了比 RBPF-SALM 算法和文献[15]算法更精确的地图,同时轨迹和 路标估计的均方根误差、运行时间也大大缩减。 表 3 3 种算法创建地图数据 Table 3 Map data of three algorithms 算法 轨迹 RMSE 路标 RMSE 粒子数 运行时间/s RBPF 2.013 1.391 39 317 文献[15] 1.279 1.026 24 201 改进的 RBPF 0.925 0.836 16 126 (a) RBPF 实验结果 (b) 文献[15]实验结果 (c) 改进的 RBPF 实验结果 图 5 Rviz 实时构建地图 Fig. 5 Rviz building a map in real time 4 结束语 为解决 RBPF 算法中粒子退化和多样性降低 问题,本文提出一种 QPSO-RBPF-SLAM 算法。将 机器人运动模型和观测模型作为提议分布,在重 采样过程中结合量子粒子群思想和遗传算法,利 用 QPSO 算法更新粒子位姿,根据权值划分粒子 种类引入自适应交叉变异操作对所得粒子集进行 优化、调整。同时,在机器人 ROS 平台上利用旅 行家 2 号机器人进行实验,以较少的粒子数和较 短时间在精确估计机器人位姿的同时能够创建 较高精度的栅格地图。下一步,在获得的高精 度栅格地图的基础上对移动机器人进行路径规划 研究。 参考文献: 张聪聪, 王新珩, 董育宁. 基于地磁场的室内定位和地图 构建[J]. 仪器仪表学报, 2015, 36(1): 181–186. ZHANG Congcong, WANG Xinheng, DONG Yuning. Simultaneous localization and mapping based on indoor [1] magnetic anomalies[J]. Chinese Journal of scientific instrument, 2015, 36(1): 181–186. KUNDU A S, MAZUMDER O, DHAR A, et al. Occupancy grid map generation using 360° scanning xtion pro live for indoor mobile robot navigation[C]//Proceedings of 2016 IEEE First International Conference on Control, Measurement and Instrumentation. Kolkata, India, 2016: 464–468. [2] AKAI N, OZAKI K. A navigation method based on topological magnetic and geometric maps for outdoor mobile robots[C]//Proceedings of 2015 IEEE/SICE International Symposium on System Integration. Nagoya, Japan, 2015: 352–357. [3] RAMAITHITIMA R, WHITZER M, BHATTACHARYA S, et al. Automated creation of topological maps in unknown environments using a swarm of resource-constrained robots[J]. IEEE robotics and automation letters, 2016, 1(2): 746–753. [4] 戴雪梅, 郎朗, 陈孟元. 强跟踪平方根容积卡尔曼滤波 SLAM 算法[J]. 电子测量与仪器学报, 2015, 29(10): [5] ·834· 智 能 系 统 学 报 第 13 卷