正在加载图片...
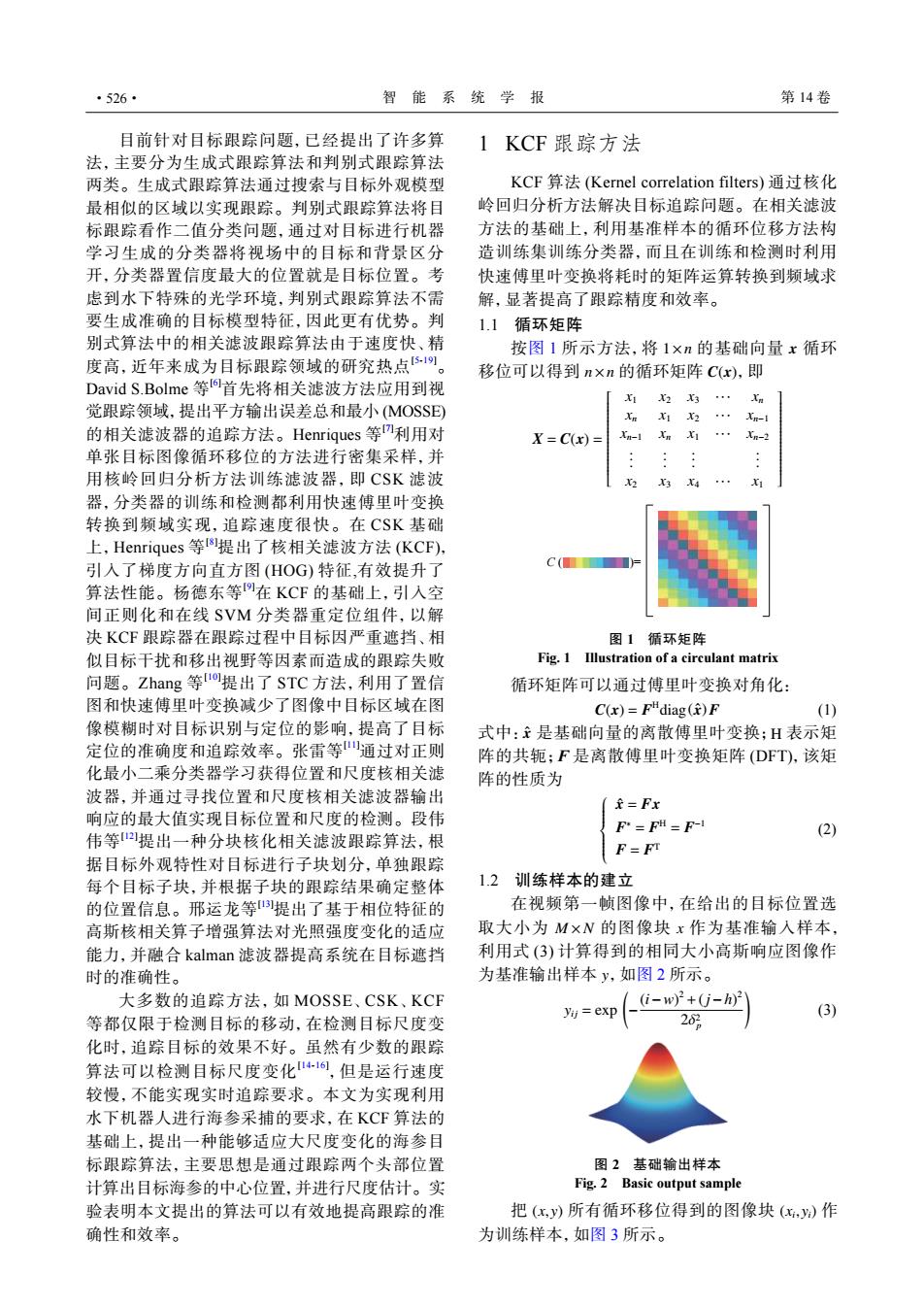
·526· 智能系统学报 第14卷 目前针对目标跟踪问题,已经提出了许多算 1KCF跟踪方法 法,主要分为生成式跟踪算法和判别式跟踪算法 两类。生成式跟踪算法通过搜索与目标外观模型 KCF算法(Kernel correlation filters)通过核化 最相似的区域以实现跟踪。判别式跟踪算法将目 岭回归分析方法解决目标追踪问题。在相关滤波 标跟踪看作二值分类问题,通过对目标进行机器 方法的基础上,利用基准样本的循环位移方法构 学习生成的分类器将视场中的目标和背景区分 造训练集训练分类器,而且在训练和检测时利用 开,分类器置信度最大的位置就是目标位置。考 快速傅里叶变换将耗时的矩阵运算转换到频域求 虑到水下特殊的光学环境,判别式跟踪算法不需 解,显著提高了跟踪精度和效率。 要生成准确的目标模型特征,因此更有优势。判 1.1 循环矩阵 别式算法中的相关滤波跟踪算法由于速度快、精 按图1所示方法,将1×n的基础向量x循环 度高,近年来成为目标跟踪领域的研究热点1。 移位可以得到n×n的循环矩阵C(x),即 David S.Bolme等首先将相关滤波方法应用到视 觉跟踪领域,提出平方输出误差总和最小(MOSSE) X1 X2 …Xn- 的相关滤波器的追踪方法。Henriques等m利用对 X=C(x)= Xn-1 Xn1.. Xn-2 单张目标图像循环移位的方法进行密集采样,并 用核岭回归分析方法训练滤波器,即CSK滤波 X2 X3 器,分类器的训练和检测都利用快速傅里叶变换 转换到频域实现,追踪速度很快。在CSK基础 上,Henriques等I提出了核相关滤波方法(KCF), 引入了梯度方向直方图(HOG)特征,有效提升了 算法性能。杨德东等9在KC℉的基础上,引入空 间正则化和在线SVM分类器重定位组件,以解 决KCF跟踪器在跟踪过程中目标因严重遮挡、相 图1循环矩阵 似目标干扰和移出视野等因素而造成的跟踪失败 Fig.1 Illustration of a circulant matrix 问题。Zhang等o提出了STC方法,利用了置信 循环矩阵可以通过傅里叶变换对角化: 图和快速傅里叶变换减少了图像中目标区域在图 C(x)=Fdiag(F (1) 像模糊时对目标识别与定位的影响,提高了目标 式中::是基础向量的离散傅里叶变换;H表示矩 定位的准确度和追踪效率。张雷等通过对正则 阵的共轭;F是离散傅里叶变换矩阵(DFT),该矩 化最小二乘分类器学习获得位置和尺度核相关滤 阵的性质为 波器,并通过寻找位置和尺度核相关滤波器输出 =Fx 响应的最大值实现目标位置和尺度的检测。段伟 F =FH=F- 伟等提出一种分块核化相关滤波跟踪算法,根 (2) F=FT 据目标外观特性对目标进行子块划分,单独跟踪 每个目标子块,并根据子块的跟踪结果确定整体 1.2 训练样本的建立 的位置信息。邢运龙等提出了基于相位特征的 在视频第一帧图像中,在给出的目标位置选 高斯核相关算子增强算法对光照强度变化的适应 取大小为M×N的图像块x作为基准输入样本, 能力,并融合kalman滤波器提高系统在目标遮挡 利用式(3)计算得到的相同大小高斯响应图像作 时的准确性。 为基准输出样本y,如图2所示。 大多数的追踪方法,如MOSSE、CSK、KCF (i-w)2+G-h)2 yii exp (3) 等都仅限于检测目标的移动,在检测目标尺度变 263 化时,追踪目标的效果不好。虽然有少数的跟踪 算法可以检测目标尺度变化46,但是运行速度 较慢,不能实现实时追踪要求。本文为实现利用 水下机器人进行海参采捕的要求,在KCF算法的 基础上,提出一种能够适应大尺度变化的海参目 标跟踪算法,主要思想是通过跟踪两个头部位置 图2基础输出样本 计算出目标海参的中心位置,并进行尺度估计。实 Fig.2 Basic output sample 验表明本文提出的算法可以有效地提高跟踪的准 把(x,y)所有循环移位得到的图像块(x,y)作 确性和效率。 为训练样本,如图3所示。目前针对目标跟踪问题,已经提出了许多算 法,主要分为生成式跟踪算法和判别式跟踪算法 两类。生成式跟踪算法通过搜索与目标外观模型 最相似的区域以实现跟踪。判别式跟踪算法将目 标跟踪看作二值分类问题,通过对目标进行机器 学习生成的分类器将视场中的目标和背景区分 开,分类器置信度最大的位置就是目标位置。考 虑到水下特殊的光学环境,判别式跟踪算法不需 要生成准确的目标模型特征,因此更有优势。判 别式算法中的相关滤波跟踪算法由于速度快、精 度高,近年来成为目标跟踪领域的研究热点[5-19]。 David S.Bolme 等 [6]首先将相关滤波方法应用到视 觉跟踪领域,提出平方输出误差总和最小 (MOSSE) 的相关滤波器的追踪方法。Henriques 等 [7]利用对 单张目标图像循环移位的方法进行密集采样,并 用核岭回归分析方法训练滤波器,即 CSK 滤波 器,分类器的训练和检测都利用快速傅里叶变换 转换到频域实现,追踪速度很快。在 CSK 基础 上,Henriques 等 [8]提出了核相关滤波方法 (KCF), 引入了梯度方向直方图 (HOG) 特征,有效提升了 算法性能。杨德东等[9]在 KCF 的基础上,引入空 间正则化和在线 SVM 分类器重定位组件,以解 决 KCF 跟踪器在跟踪过程中目标因严重遮挡、相 似目标干扰和移出视野等因素而造成的跟踪失败 问题。Zhang 等 [10]提出了 STC 方法,利用了置信 图和快速傅里叶变换减少了图像中目标区域在图 像模糊时对目标识别与定位的影响,提高了目标 定位的准确度和追踪效率。张雷等[11]通过对正则 化最小二乘分类器学习获得位置和尺度核相关滤 波器,并通过寻找位置和尺度核相关滤波器输出 响应的最大值实现目标位置和尺度的检测。段伟 伟等[12]提出一种分块核化相关滤波跟踪算法,根 据目标外观特性对目标进行子块划分,单独跟踪 每个目标子块,并根据子块的跟踪结果确定整体 的位置信息。邢运龙等[13]提出了基于相位特征的 高斯核相关算子增强算法对光照强度变化的适应 能力,并融合 kalman 滤波器提高系统在目标遮挡 时的准确性。 大多数的追踪方法,如 MOSSE、CSK、KCF 等都仅限于检测目标的移动,在检测目标尺度变 化时,追踪目标的效果不好。虽然有少数的跟踪 算法可以检测目标尺度变化[14-16] ,但是运行速度 较慢,不能实现实时追踪要求。本文为实现利用 水下机器人进行海参采捕的要求,在 KCF 算法的 基础上,提出一种能够适应大尺度变化的海参目 标跟踪算法,主要思想是通过跟踪两个头部位置 计算出目标海参的中心位置,并进行尺度估计。实 验表明本文提出的算法可以有效地提高跟踪的准 确性和效率。 1 KCF 跟踪方法 KCF 算法 (Kernel correlation filters) 通过核化 岭回归分析方法解决目标追踪问题。在相关滤波 方法的基础上,利用基准样本的循环位移方法构 造训练集训练分类器,而且在训练和检测时利用 快速傅里叶变换将耗时的矩阵运算转换到频域求 解,显著提高了跟踪精度和效率。 1.1 循环矩阵 1×n x n×n C(x) 按图 1 所示方法,将 的基础向量 循环 移位可以得到 的循环矩阵 ,即 X = C(x) = x1 x2 x3 ··· xn xn x1 x2 ··· xn−1 xn−1 xn x1 ··· xn−2 . . . . . . . . . . . . x2 x3 x4 ··· x1 C ( )= 图 1 循环矩阵 Fig. 1 Illustration of a circulant matrix 循环矩阵可以通过傅里叶变换对角化: C(x) = F H diag(xˆ)F (1) 式中: xˆ 是基础向量的离散傅里叶变换; H 表示矩 阵的共轭;F 是离散傅里叶变换矩阵 (DFT),该矩 阵的性质为 xˆ = Fx F ∗ = F H = F −1 F = F T (2) 1.2 训练样本的建立 M ×N x y 在视频第一帧图像中,在给出的目标位置选 取大小为 的图像块 作为基准输入样本, 利用式 (3) 计算得到的相同大小高斯响应图像作 为基准输出样本 ,如图 2 所示。 yi j = exp ( − (i−w) 2 +(j−h) 2 2δ 2 p ) (3) 图 2 基础输出样本 Fig. 2 Basic output sample (x, y) (xi 把 所有循环移位得到的图像块 , yi) 作 为训练样本,如图 3 所示。 ·526· 智 能 系 统 学 报 第 14 卷