正在加载图片...
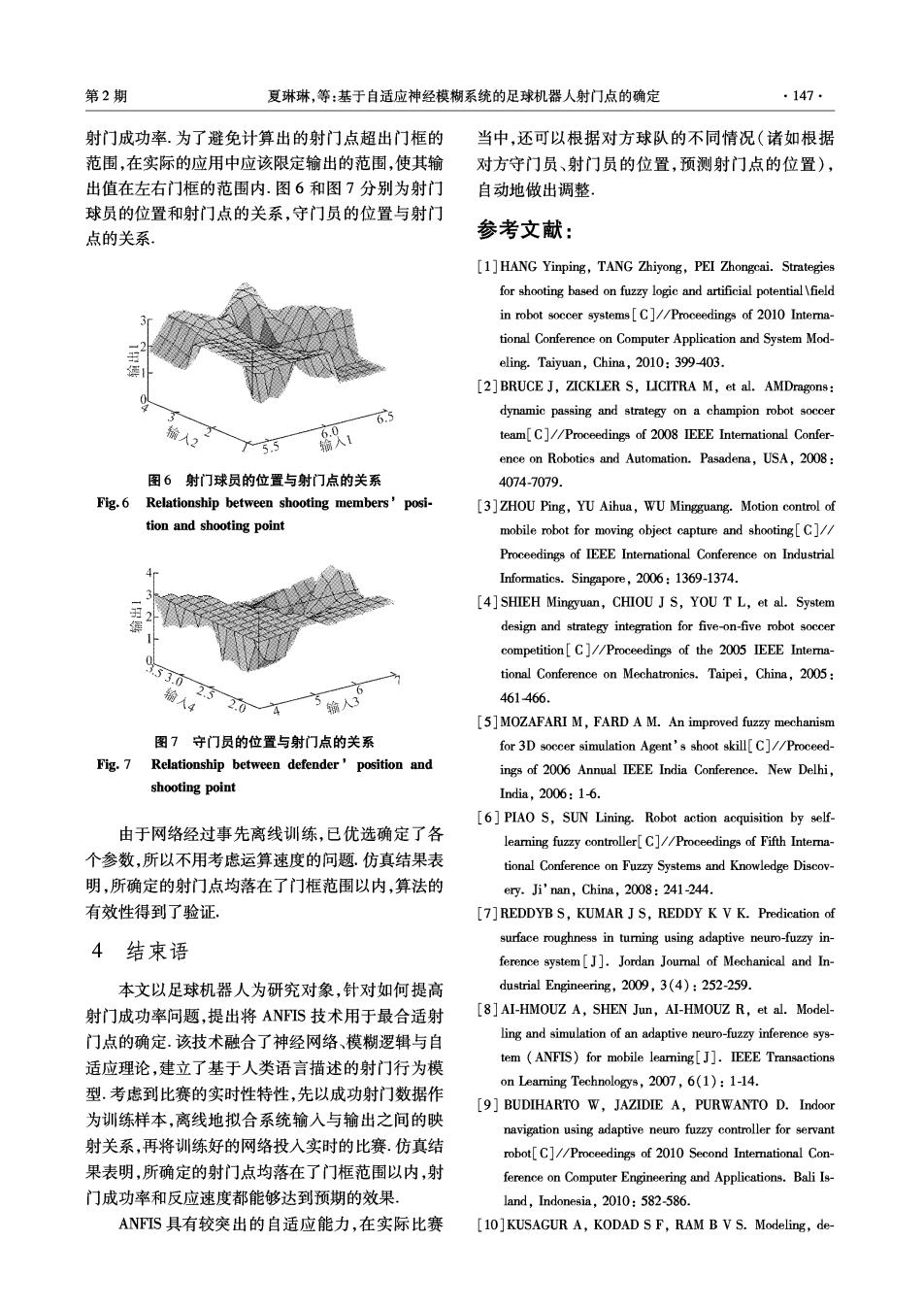
第2期 夏琳琳,等:基于自适应神经模糊系统的足球机器人射门点的确定 ·147 射门成功率.为了避免计算出的射门点超出门框的 当中,还可以根据对方球队的不同情况(诸如根据 范围,在实际的应用中应该限定输出的范围,使其输 对方守门员、射门员的位置,预测射门点的位置), 出值在左右门框的范围内.图6和图7分别为射门 自动地做出调整. 球员的位置和射门点的关系,守门员的位置与射门 点的关系 参考文献: [1]HANG Yinping,TANG Zhiyong,PEI Zhongcai.Strategies for shooting based on fuzzy logic and artificial potential field in robot soccer systems [C]//Proceedings of 2010 Interna- tional Conference on Computer Application and System Mod- eling.Taiyuan,China,2010:399-403. [2]BRUCE J,ZICKLER S,LICITRA M,et al.AMDragons: 6.5 dynamic passing and strategy on a champion robot soccer 输入2 了55 织1 team[C]//Proceedings of 2008 IEEE International Confer- ence on Robotics and Automation.Pasadena,USA,2008: 图6射门球员的位置与射门点的关系 4074-7079. Fig.6 Relationship between shooting members'posi- [3 ]ZHOU Ping,YU Aihua,WU Mingguang.Motion control of tion and shooting point mobile robot for moving object capture and shooting[C]/ Proceedings of IEEE Intemational Conference on Industrial Informatics.Singapore,2006:1369-1374. [4]SHIEH Mingyuan,CHIOU J S,YOU T L,et al.System design and strategy integration for five-on-five robot soccer competition[C]//Proceedings of the 2005 IEEE Intera- 3.53 tional Conference on Mechatronics.Taipei,China,2005: 输人4 人 461466. [5]MOZAFARI M,FARD A M.An improved fuzzy mechanism 图7守门员的位置与射门点的关系 for 3D soccer simulation Agent's shoot skill[C]//Proceed- Fig.7 Relationship between defender'position and ings of 2006 Annual IEEE India Conference.New Delhi, shooting point India,2006:1-6. [6]PIAO S,SUN Lining.Robot action acquisition by self- 由于网络经过事先离线训练,已优选确定了各 learning fuzzy controller[C]//Proceedings of Fifth Interna- 个参数,所以不用考虑运算速度的问题.仿真结果表 tional Conference on Fuzzy Systems and Knowledge Discov- 明,所确定的射门点均落在了门框范围以内,算法的 ery.Ji'nan,China,2008:241-244. 有效性得到了验证. [7]REDDYB S,KUMAR J S,REDDY K V K.Predication of surface roughness in turning using adaptive neuro-fuzzy in- 4结束语 ference system[J].Jordan Joumal of Mechanical and In- 本文以足球机器人为研究对象,针对如何提高 dustrial Engineering,2009,3(4):252-259. 射门成功率问题,提出将ANIS技术用于最合适射 [8]AI-HMOUZ A,SHEN Jun,AI-HMOUZ R,et al.Model- 门点的确定.该技术融合了神经网络、模糊逻辑与自 ling and simulation of an adaptive neuro-fuzzy inference sys- 适应理论,建立了基于人类语言描述的射门行为模 tem (ANFIS)for mobile learning[J].IEEE Transactions on Learning Technologys,2007,6(1):1-14. 型.考虑到比赛的实时性特性,先以成功射门数据作 [9]BUDIHARTO W,JAZIDIE A,PURWANTO D.Indoor 为训练样本,离线地拟合系统输入与输出之间的映 navigation using adaptive neuro fuzzy controller for servant 射关系,再将训练好的网络投入实时的比赛.仿真结 robot[C]//Proceedings of 2010 Second International Con- 果表明,所确定的射门点均落在了门框范围以内,射 ference on Computer Engineering and Applications.Bali Is- 门成功率和反应速度都能够达到预期的效果, land,Indonesia,2010:582-586. ANFIS具有较突出的自适应能力,在实际比赛 [10]KUSAGUR A,KODAD S F,RAM B V S.Modeling,de-