正在加载图片...
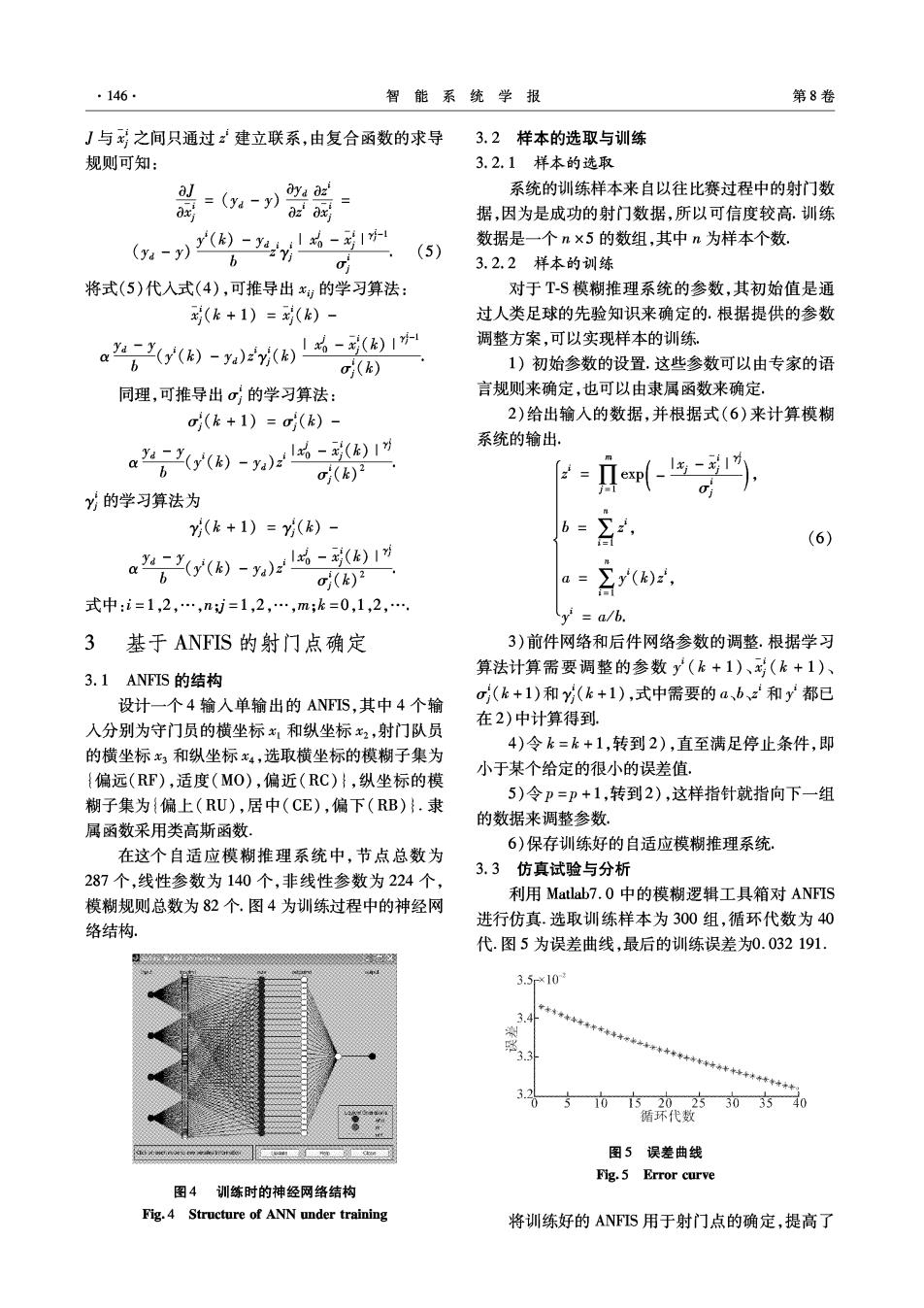
146. 智能系统学报 第8卷 J与x之间只通过:建立联系,由复合函数的求导 3.2样本的选取与训练 规则可知: 3.2.1样本的选取 =(a-y) aJ 系统的训练样本来自以往比赛过程中的射门数 axj 据,因为是成功的射门数据,所以可信度较高.训练 (-))或-1* 数据是一个n×5的数组,其中n为样本个数. b (5) 3.2.2样本的训练 将式(5)代入式(4),可推导出x的学习算法: 对于T-S模糊推理系统的参数,其初始值是通 (k+1)=()- 过人类足球的先验知识来确定的.根据提供的参数 2。'气(y()-)(6-)1 调整方案,可以实现样本的训练 (k) 1)初始参数的设置.这些参数可以由专家的语 同理,可推导出σ的学习算法: 言规则来确定,也可以由隶属函数来确定, (k+1)=σ(k)- 2)给出输人的数据,并根据式(6)来计算模糊 系统的输出, 。y-⅓)6-到1” o(k)2 Y的学习算法为 Y(k+1)=k) b= ∑ (6) ”。(y()-6-1 o(k)2 a= 式中:i=1,2,…,n=1,2,…,m;k=0,1,2,… yi a/b. 3基于ANFIS的射门点确定 3)前件网络和后件网络参数的调整.根据学习 算法计算需要调整的参数y(k+1)、(k+1) 3.1 ANFIS的结构 设计一个4输入单输出的ANFIS,其中4个输 o(k+1)和y(k+1),式中需要的a、bz和y都已 在2)中计算得到. 入分别为守门员的横坐标1和纵坐标2,射门队员 4)令k=k+1,转到2),直至满足停止条件,即 的横坐标x和纵坐标x4,选取横坐标的模糊子集为 小于某个给定的很小的误差值 {偏远(RF),适度(MO),偏近(RC)},纵坐标的模 5)令p=p+1,转到2),这样指针就指向下一组 糊子集为{偏上(RU),居中(CE),偏下(RB)}.隶 的数据来调整参数. 属函数采用类高斯函数. 6)保存训练好的自适应模糊推理系统, 在这个自适应模糊推理系统中,节点总数为 3.3仿真试验与分析 287个,线性参数为140个,非线性参数为224个, 利用Matlab7.0中的模糊逻辑工具箱对ANFIS 模糊规则总数为82个.图4为训练过程中的神经网 进行仿真.选取训练样本为300组,循环代数为40 络结构 代.图5为误差曲线,最后的训练误差为0.032191. 3.5r×10 3.2 510152025303540 循环代数 图5误差曲线 Fig.5 Error curve 图4训练时的神经网络结构 Fig.4 Structure of ANN under training 将训练好的ANFIS用于射门点的确定,提高了