正在加载图片...
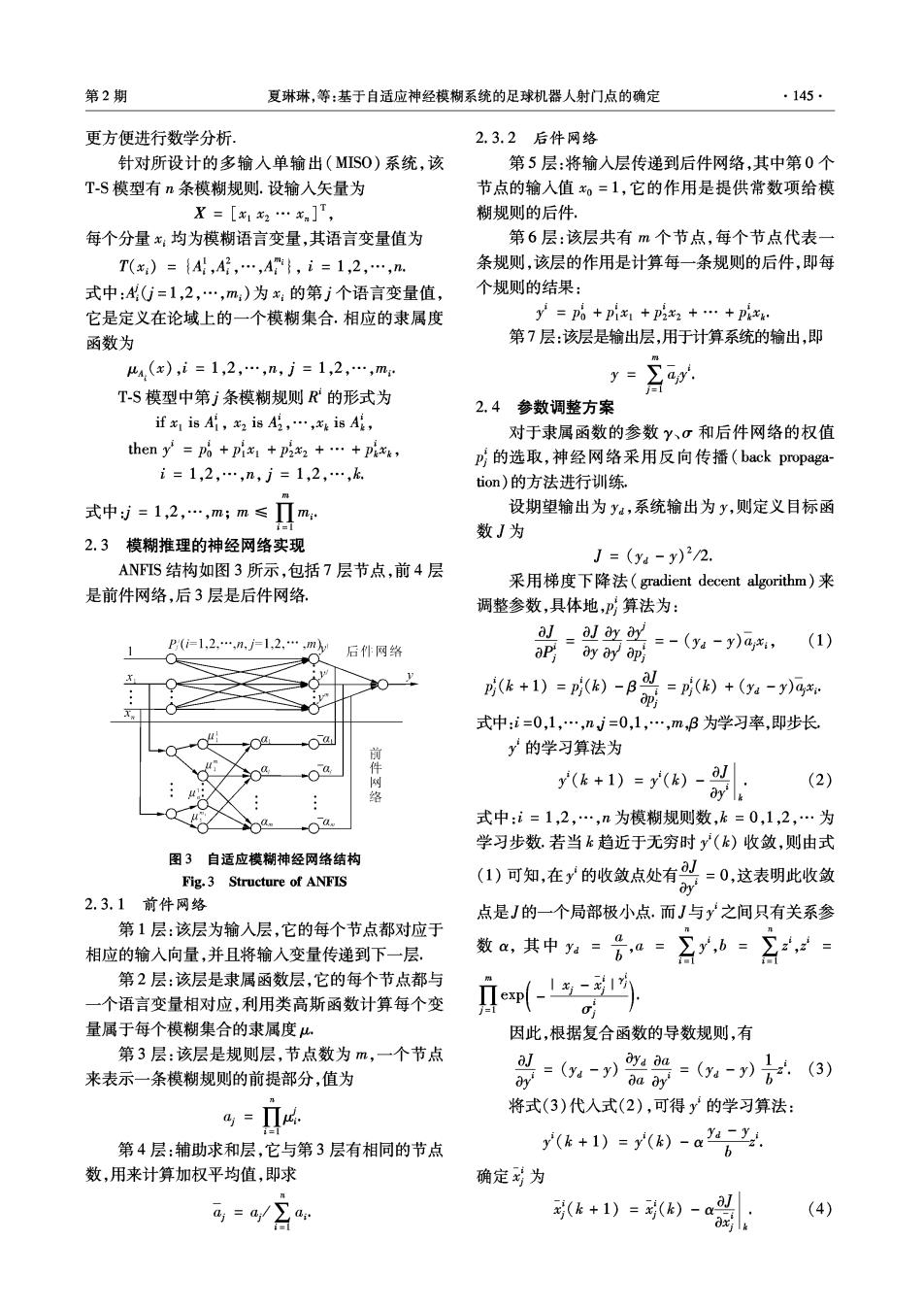
第2期 夏琳琳,等:基于自适应神经模糊系统的足球机器人射门点的确定 ·145· 更方便进行数学分析 2.3.2后件网络 针对所设计的多输入单输出(MIS0)系统,该 第5层:将输入层传递到后件网络,其中第0个 T-S模型有n条模糊规则.设输入矢量为 节点的输人值x。=1,它的作用是提供常数项给模 X=[12…x]T, 糊规则的后件. 每个分量x:均为模糊语言变量,其语言变量值为 第6层:该层共有m个节点,每个节点代表一 T(x)={A,A,…,A},i=1,2,…,n. 条规则,该层的作用是计算每一条规则的后件,即每 式中:出G=1,2,…,m:)为x:的第j个语言变量值, 个规则的结果: 它是定义在论域上的一个模糊集合,相应的隶属度 y=po +pix+pxz++pixx 函数为 第7层:该层是输出层,用于计算系统的输出,即 %(x),i=1,2,…,n,j=1,2,…,m y=24p T-S模型中第j条模糊规则R的形式为 2.4参数调整方案 if x is Ai,x2 is A2,,is Ai, 对于隶属函数的参数Y、σ和后件网络的权值 then y=po +pix+p2x2++Pxx, )的选取,神经网络采用反向传播(back propaga- i=1,2,…,n,j=1,2,…,k tion)的方法进行训练 式中:j=1,2,…,m;m≤ m 设期望输出为ya,系统输出为y,则定义目标函 数J为 2.3模糊推理的神经网络实现 J=(ya-y)2/2. ANIS结构如图3所示,包括7层节点,前4层 采用梯度下降法(gradient decent algorithm)来 是前件网络,后3层是后件网络 调整参数,具体地,卫算法为: aJ aJ ay ay P(=1,2,…,n,广F1,2,,m P=时助 =-(ya-y)ai, (1) 1 后件网络 (k+1)=p()-B =p(k)+(ya-y)g* p 式中:i=0,1,…,nJ=0,1,…,m,B为学习率,即步长 y的学习算法为 y(k+1)=y(k)-则 (2) 式中:i=1,2,…,n为模糊规则数,k=0,1,2,…为 学习步数.若当k趋近于无穷时y(k)收敛,则由式 图3自适应模糊神经网络结构 Fig.3 Structure of ANFIS (1)可知,在y的收敛点处有则=0,这表明此收敛 2.3.1前件网络 点是J的一个局部极小点,而J与y之间只有关系参 第1层:该层为输入层,它的每个节点都对应于 相应的输人向量,并且将输入变量传递到下一层 数a,其中%=合a=yb=月, 第2层:该层是隶属函数层,它的每个节点都与 一个语言变量相对应,利用类高斯函数计算每个变 e-1 量属于每个模糊集合的隶属度山 因此,根据复合函数的导数规则,有 第3层:该层是规则层,节点数为m,一个节点 来表示一条模糊规则的前提部分,值为 别=:-)船器=-)26) 马=Π4 将式(3)代人式(2),可得y的学习算法: 第4层:辅助求和层,它与第3层有相同的节点 (k+1)=()-a。4 数,用来计算加权平均值,即求 确定x为 = (k+1)=()-a (4)