正在加载图片...
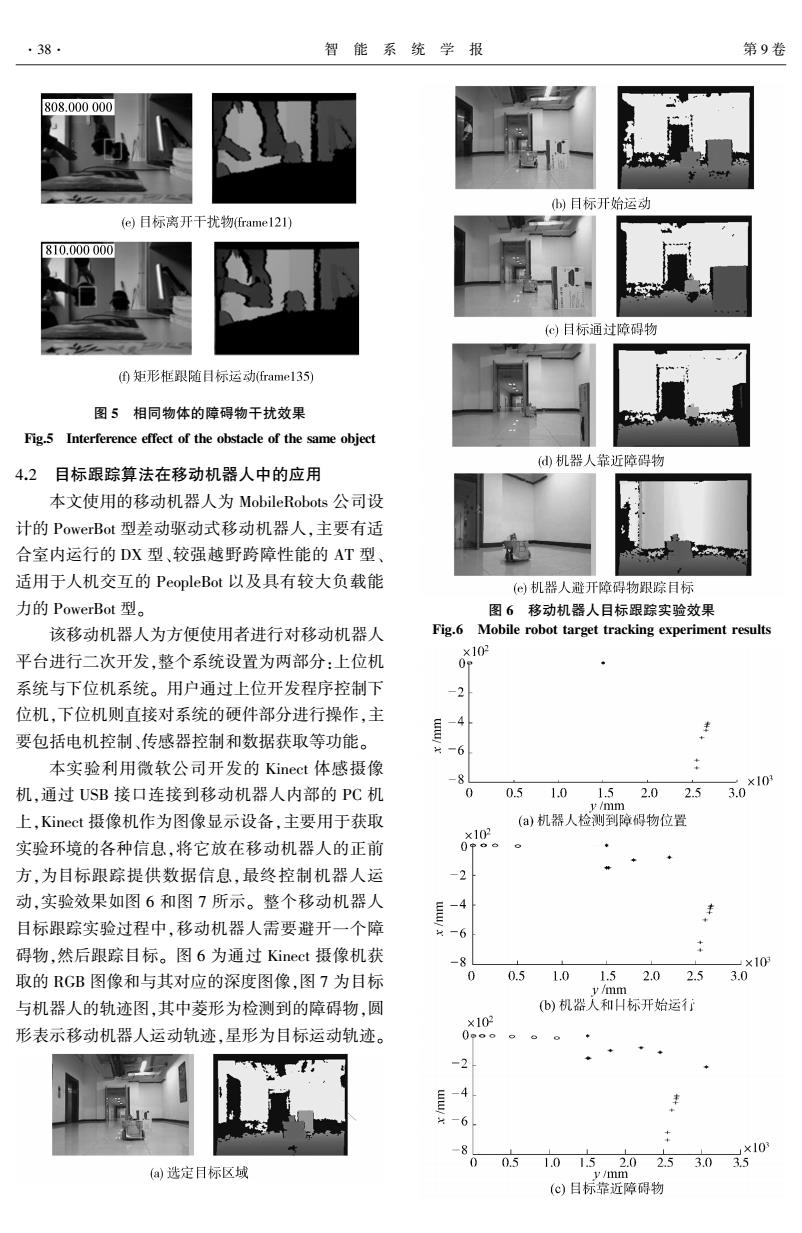
·38· 智能系统学报 第9卷 808.000000 )目标开始运动 (e)目标离开干扰物framel221) 810.000000 (©目标通过障碍物 ①矩形框跟随目标运动任rame135) 图5相同物体的障碍物干扰效果 Fig.5 Interference effect of the obstacle of the same object 仙机器人靠近障碍物 4.2目标跟踪算法在移动机器人中的应用 本文使用的移动机器人为MobileRobots公司设 计的PowerBot型差动驱动式移动机器人,主要有适 合室内运行的DX型、较强越野跨障性能的AT型、 适用于人机交互的PeopleBot以及具有较大负载能 (©)机器人避开障碍物跟踪目标 力的PowerBot型。 图6移动机器人目标跟踪实验效果 该移动机器人为方便使用者进行对移动机器人 Fig.6 Mobile robot target tracking experiment results ×102 平台进行二次开发,整个系统设置为两部分:上位机 0 系统与下位机系统。用户通过上位开发程序控制下 -2 位机,下位机则直接对系统的硬件部分进行操作,主 -4 要包括电机控制、传感器控制和数据获取等功能。 本实验利用微软公司开发的Kinect体感摄像 -8 103 机,通过USB接口连接到移动机器人内部的PC机 0.51.01.52.02.53.0 '/mm、 上,Kinect摄像机作为图像显示设备,主要用于获取 (a)机器人检测到障碍物位置 ×102 实验环境的各种信息,将它放在移动机器人的正前 方,为目标跟踪提供数据信息,最终控制机器人运 动,实验效果如图6和图7所示。整个移动机器人 目标跟踪实验过程中,移动机器人需要避开一个障 -6 碍物,然后跟踪目标。图6为通过Kinect摄像机获 8 ×10 取的RGB图像和与其对应的深度图像,图7为目标 0.5 1.0 1.5 2.02.53.0 y/mm 与机器人的轨迹图,其中菱形为检测到的障碍物,圆 (b)机器人和H标开始运 ×102 形表示移动机器人运动轨迹,星形为目标运动轨迹。 0oo -2 -4 -6 ++ -8 103 0 0.51.01.52.02.53.035 (a)选定目标区域 y/mm (c)目标靠近障碍物图 5 相同物体的障碍物干扰效果 Fig.5 Interference effect of the obstacle of the same object 4.2 目标跟踪算法在移动机器人中的应用 本文使用的移动机器人为 MobileRobots 公司设 计的 PowerBot 型差动驱动式移动机器人,主要有适 合室内运行的 DX 型、较强越野跨障性能的 AT 型、 适用于人机交互的 PeopleBot 以及具有较大负载能 力的 PowerBot 型。 该移动机器人为方便使用者进行对移动机器人 平台进行二次开发,整个系统设置为两部分:上位机 系统与下位机系统。 用户通过上位开发程序控制下 位机,下位机则直接对系统的硬件部分进行操作,主 要包括电机控制、传感器控制和数据获取等功能。 本实验利用微软公司开发的 Kinect 体感摄像 机,通过 USB 接口连接到移动机器人内部的 PC 机 上,Kinect 摄像机作为图像显示设备,主要用于获取 实验环境的各种信息,将它放在移动机器人的正前 方,为目标跟踪提供数据信息,最终控制机器人运 动,实验效果如图 6 和图 7 所示。 整个移动机器人 目标跟踪实验过程中,移动机器人需要避开一个障 碍物,然后跟踪目标。 图 6 为通过 Kinect 摄像机获 取的 RGB 图像和与其对应的深度图像,图 7 为目标 与机器人的轨迹图,其中菱形为检测到的障碍物,圆 形表示移动机器人运动轨迹,星形为目标运动轨迹。 图 6 移动机器人目标跟踪实验效果 Fig.6 Mobile robot target tracking experiment results ·38· 智 能 系 统 学 报 第 9 卷