正在加载图片...
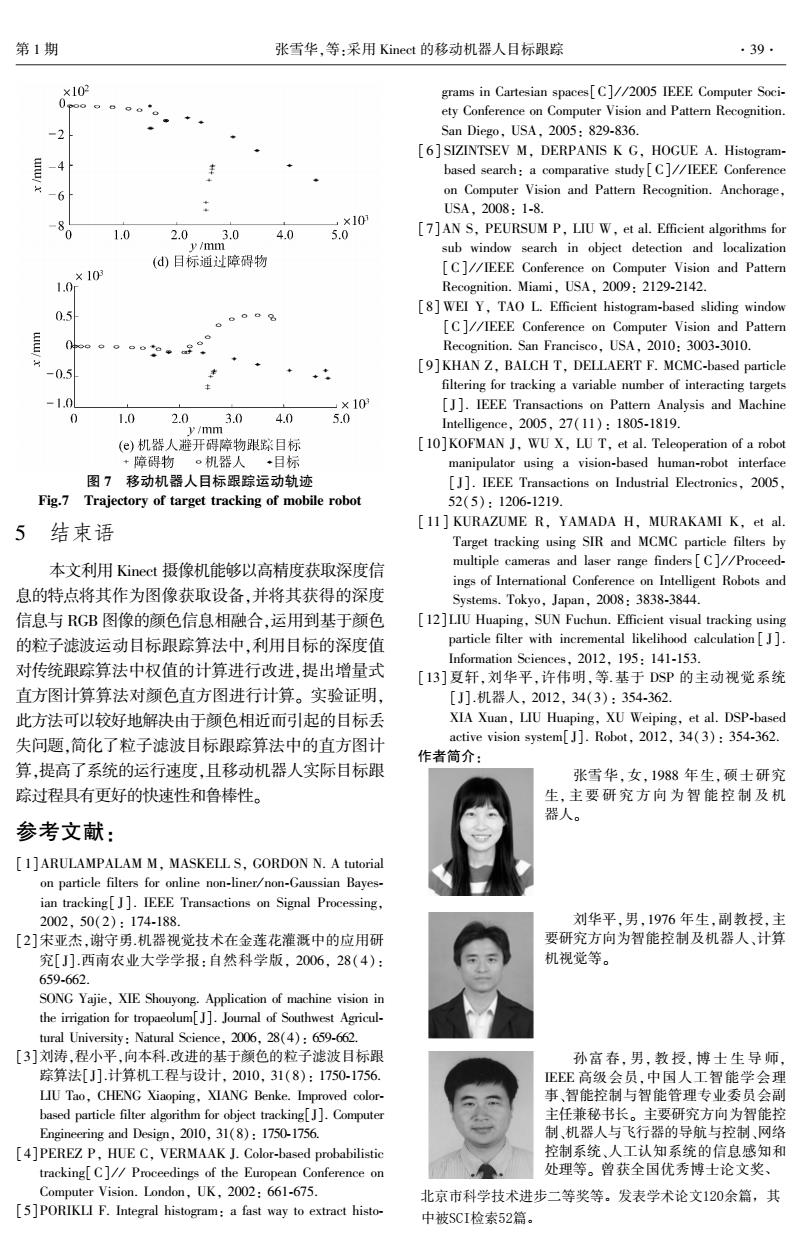
第1期 张雪华,等:采用Kinect的移动机器人目标跟踪 ·39· ×102 grams in Cartesian spaces[C]//2005 IEEE Computer Soci- ety Conference on Computer Vision and Pattern Recognition. San Diego,USA,2005:829-836. [6]SIZINTSEV M,DERPANIS K G,HOGUE A.Histogram- based search:a comparative study[C]//IEEE Conference 4 on Computer Vision and Pattern Recognition.Anchorage, USA,2008:1-8. ×10 1.0 2.03.0 4.0 5.0 [7]AN S,PEURSUM P,LIU W,et al.Efficient algorithms for y/mm sub window search in object detection and localization (d)目标通过障碍物 ×10 [C]//IEEE Conference on Computer Vision and Pattern 1.0m Recognition.Miami,USA,2009:2129-2142. [8]WEI Y,TAO L.Efficient histogram-based sliding window [C]//IEEE Conference on Computer Vision and Pattern Recognition.San Francisco,USA,2010:3003-3010. [9]KHAN Z,BALCH T,DELLAERT F.MCMC-based particle 0.5 filtering for tracking a variable number of interacting targets 1.0 ×10 [J].IEEE Transactions on Pattern Analysis and Machine 0 1.0 2.03.0 4.0 5.0 y/mm Intelligence,2005,27(11):1805-1819. (©)机器人避开碍障物跟踪目标 [10]KOFMAN J,WU X,LU T,et al.Teleoperation of a robot +障碍物。机器人+目标 manipulator using a vision-based human-robot interface 图7移动机器人目标跟踪运动轨迹 [J].IEEE Transactions on Industrial Electronics,2005, Fig.7 Trajectory of target tracking of mobile robot 52(5):1206-1219. 5结束语 [11]KURAZUME R,YAMADA H,MURAKAMI K,et al. Target tracking using SIR and MCMC particle filters by 本文利用Kinect摄像机能够以高精度获取深度信 multiple cameras and laser range finders[C]//Proceed- ings of International Conference on Intelligent Robots and 息的特点将其作为图像获取设备,并将其获得的深度 Systems.Tokyo,Japan,2008:3838-3844. 信息与RGB图像的颜色信息相融合,运用到基于颜色 [12]LIU Huaping,SUN Fuchun.Efficient visual tracking using 的粒子滤波运动目标跟踪算法中,利用目标的深度值 particle filter with incremental likelihood calculation[J]. Information Sciences,2012,195:141-153. 对传统跟踪算法中权值的计算进行改进,提出增量式 [13]夏轩,刘华平,许伟明,等.基于DSP的主动视觉系统 直方图计算算法对颜色直方图进行计算。实验证明, [J].机器人,2012,34(3):354-362. 此方法可以较好地解决由于颜色相近而引起的目标丢 XIA Xuan,LIU Huaping,XU Weiping,et al.DSP-based 失问题,简化了粒子滤波目标跟踪算法中的直方图计 active vision system[J].Robot,2012,34(3):354-362. 作者简介: 算,提高了系统的运行速度,且移动机器人实际目标跟 张雪华,女,1988年生,硕士研究 踪过程具有更好的快速性和鲁棒性。 生,主要研究方向为智能控制及机 器人。 参考文献: [1]ARULAMPALAM M,MASKELL S,GORDON N.A tutorial on particle filters for online non-liner/non-Gaussian Bayes- ian tracking[J].IEEE Transactions on Signal Processing, 2002.50(2):174-188. 刘华平,男,1976年生,副教授,主 [2]宋亚杰,谢守勇.机器视觉技术在金莲花灌溉中的应用研 要研究方向为智能控制及机器人、计算 究[J].西南农业大学学报:自然科学版,2006,28(4): 机视觉等。 659-662. SONG Yajie,XIE Shouyong.Application of machine vision in the irrigation for tropaeolum[J].Joumal of Southwest Agricul- tural University:Natural Science,2006,28(4):659-662. [3]刘涛,程小平,向本科.改进的基于颜色的粒子滤波目标跟 孙富春,男,教授,博士生导师 踪算法[J刀计算机工程与设计,2010,31(8):1750-1756. EE高级会员,中国人工智能学会理 LIU Tao,CHENG Xiaoping,XIANG Benke.Improved color- 事、智能控制与智能管理专业委员会副 based particle filter algorithm for object tracking[J].Computer 主任兼秘书长。主要研究方向为智能控 Engineering and Design,2010,31(8):1750-1756. 制、机器人与飞行器的导航与控制、网络 [4]PEREZ P,HUE C,VERMAAK J.Color-based probabilistic 控制系统、人工认知系统的信息感知和 tracking[C]//Proceedings of the European Conference on 处理等。曾获全国优秀博士论文奖、 Computer Vision.London,UK,2002:661-675. 北京市科学技术进步二等奖等。发表学术论文120余篇,其 [5]PORIKLI F.Integral histogram:a fast way to extract histo- 中被SCI检索52篇。图 7 移动机器人目标跟踪运动轨迹 Fig.7 Trajectory of target tracking of mobile robot 5 结束语 本文利用 Kinect 摄像机能够以高精度获取深度信 息的特点将其作为图像获取设备,并将其获得的深度 信息与 RGB 图像的颜色信息相融合,运用到基于颜色 的粒子滤波运动目标跟踪算法中,利用目标的深度值 对传统跟踪算法中权值的计算进行改进,提出增量式 直方图计算算法对颜色直方图进行计算。 实验证明, 此方法可以较好地解决由于颜色相近而引起的目标丢 失问题,简化了粒子滤波目标跟踪算法中的直方图计 算,提高了系统的运行速度,且移动机器人实际目标跟 踪过程具有更好的快速性和鲁棒性。 参考文献: [ 1]ARULAMPALAM M, MASKELL S, GORDON N. A tutorial on particle filters for online non⁃liner/ non⁃Gaussian Bayes⁃ ian tracking[ J]. IEEE Transactions on Signal Processing, 2002, 50(2): 174⁃188. [2]宋亚杰,谢守勇.机器视觉技术在金莲花灌溉中的应用研 究[J].西南农业大学学报:自然科学版, 2006, 28(4): 659⁃662. SONG Yajie, XIE Shouyong. Application of machine vision in the irrigation for tropaeolum[J]. Journal of Southwest Agricul⁃ tural University: Natural Science, 2006, 28(4): 659⁃662. [3]刘涛,程小平,向本科.改进的基于颜色的粒子滤波目标跟 踪算法[J].计算机工程与设计, 2010, 31(8): 1750⁃1756. LIU Tao, CHENG Xiaoping, XIANG Benke. Improved color⁃ based particle filter algorithm for object tracking[J]. Computer Engineering and Design, 2010, 31(8): 1750⁃1756. [4]PEREZ P, HUE C, VERMAAK J. Color⁃based probabilistic tracking[C] / / Proceedings of the European Conference on Computer Vision. London, UK, 2002: 661⁃675. [5]PORIKLI F. Integral histogram: a fast way to extract histo⁃ grams in Cartesian spaces[C] / / 2005 IEEE Computer Soci⁃ ety Conference on Computer Vision and Pattern Recognition. San Diego, USA, 2005: 829⁃836. [6] SIZINTSEV M, DERPANIS K G, HOGUE A. Histogram⁃ based search: a comparative study[C] / / IEEE Conference on Computer Vision and Pattern Recognition. Anchorage, USA, 2008: 1⁃8. [7]AN S, PEURSUM P, LIU W, et al. Efficient algorithms for sub window search in object detection and localization [C] / / IEEE Conference on Computer Vision and Pattern Recognition. Miami, USA, 2009: 2129⁃2142. [8] WEI Y, TAO L. Efficient histogram⁃based sliding window [C] / / IEEE Conference on Computer Vision and Pattern Recognition. San Francisco, USA, 2010: 3003⁃3010. [9]KHAN Z, BALCH T, DELLAERT F. MCMC⁃based particle filtering for tracking a variable number of interacting targets [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(11): 1805⁃1819. [10]KOFMAN J, WU X, LU T, et al. Teleoperation of a robot manipulator using a vision⁃based human⁃robot interface [J]. IEEE Transactions on Industrial Electronics, 2005, 52(5): 1206⁃1219. [ 11] KURAZUME R, YAMADA H, MURAKAMI K, et al. Target tracking using SIR and MCMC particle filters by multiple cameras and laser range finders [ C] / / Proceed⁃ ings of International Conference on Intelligent Robots and Systems. Tokyo, Japan, 2008: 3838⁃3844. [12]LIU Huaping, SUN Fuchun. Efficient visual tracking using particle filter with incremental likelihood calculation [ J]. Information Sciences, 2012, 195: 141⁃153. [13] 夏轩,刘华平,许伟明,等.基于 DSP 的主动视觉系统 [J].机器人, 2012, 34(3): 354⁃362. XIA Xuan, LIU Huaping, XU Weiping, et al. DSP⁃based active vision system[J]. Robot, 2012, 34(3): 354⁃362. 作者简介: 张雪华,女,1988 年生,硕士研究 生, 主 要 研 究 方 向 为 智 能 控 制 及 机 器人。 刘华平,男,1976 年生,副教授,主 要研究方向为智能控制及机器人、计算 机视觉等。 孙富 春, 男, 教 授, 博 士 生 导 师, IEEE 高级会员,中国人工智能学会理 事、智能控制与智能管理专业委员会副 主任兼秘书长。 主要研究方向为智能控 制、机器人与飞行器的导航与控制、网络 控制系统、人工认知系统的信息感知和 处理等。 曾获全国优秀博士论文 39· 奖、 第 1 期 张雪华,等:采用 Kinect 的移动机器人目标跟踪 · 中被SCI检索52 北京市科学技术进步二等奖等。发表学术论文120余篇,其 篇