正在加载图片...
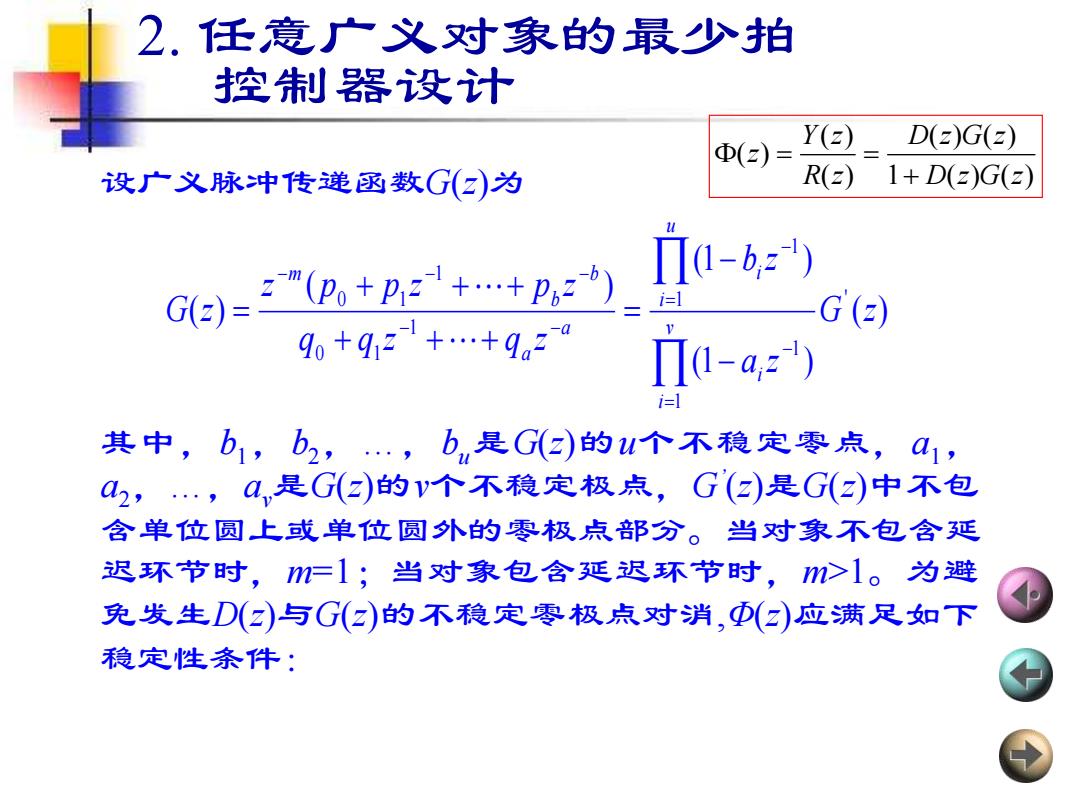
2.任意广义对象的最少拍 控制器设计 Y() D(G( Φ(z)= 设广义脉冲传递函数G()为 R() 1+D(z)G(z) Ge)="(p+p++p2 Π0-bz) i=1 G (2) 90+912+…+9a2 1-a,z) 其中,b1,b2,…,b是G()的u个不稳定零点,a1, a,是G(z)的v个不稳定极点,G(z)是G(z)中不包 含单位圆上或单位圆外的零极点部分。当对象不包含延 迟环节时,m=1;当对象包含延迟环节时,m>l。为避 免发生D()与G(2)的不稳定零极点对消,D(☑)应满足如下 稳定性条件:2. 任意广义对象的最少拍 控制器设计 设广义脉冲传递函数G(z)为 其中,b1,b2,…,bu是G(z)的u个不稳定零点,a1, a2,…,av是G(z)的v个不稳定极点,G’ (z)是G(z)中不包 含单位圆上或单位圆外的零极点部分。当对象不包含延 迟环节时,m=1;当对象包含延迟环节时,m>1。为避 免发生D(z)与G(z)的不稳定零极点对消,Φ(z)应满足如下 稳定性条件: ( ) (1 ) (1 ) ( ) ( ) ' 1 1 1 1 1 0 1 1 0 1 G z a z b z q q z q z z p p z p z G z v i i u i i a a b b m = − = − − − − − − − − = + + + + + + = 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) D z G z D z G z R z Y z z + = =