正在加载图片...
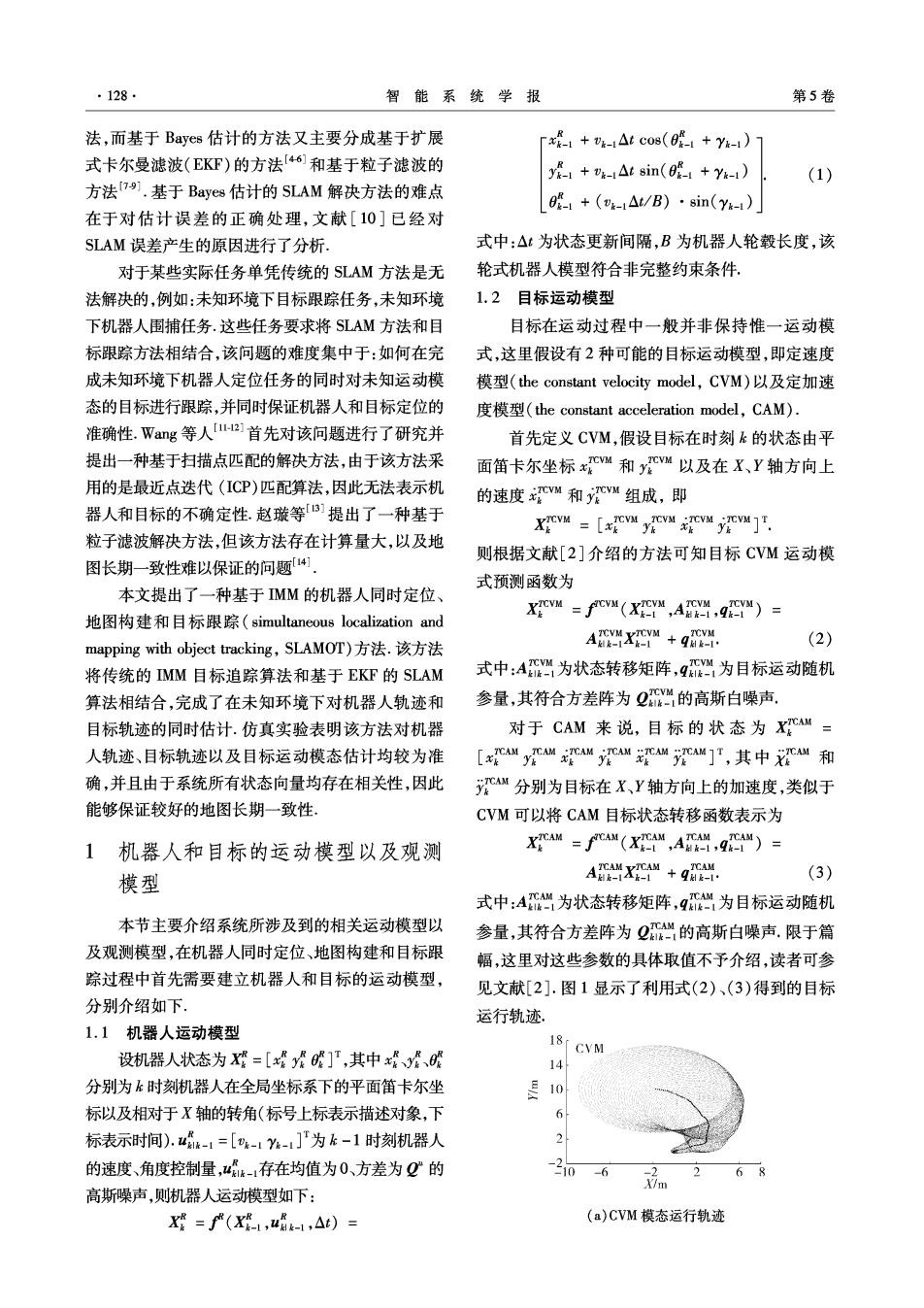
·128· 智能系统学报 第5卷 法,而基于Bayes估计的方法又主要分成基于扩展 x-1+4-△tcos(θ-+ys-1) 式卡尔曼滤波(EKF)的方法[4和基于粒子滤波的 yR-1+k-1△t8in(0瞻-+Yk-i) (1) 方法9).基于Bayes估计的SLAM解决方法的难点 0-l+(k-△t/B)·sin(yk-i) 在于对估计误差的正确处理,文献[10]已经对 SLAM误差产生的原因进行了分析 式中:△:为状态更新间隔,B为机器人轮毂长度,该 对于某些实际任务单凭传统的SLAM方法是无 轮式机器人模型符合非完整约束条件, 法解决的,例如:未知环境下目标跟踪任务,未知环境 1.2目标运动模型 下机器人围捕任务.这些任务要求将SLAM方法和目 目标在运动过程中一般并非保持惟一运动模 标跟踪方法相结合,该问题的难度集中于:如何在完 式,这里假设有2种可能的目标运动模型,即定速度 成未知环境下机器人定位任务的同时对未知运动模 模型(the constant velocity model,CVM)以及定加速 态的目标进行跟踪,并同时保证机器人和目标定位的 度模型(the constant acceleration model,CAM) 准确性.Wang等人21首先对该问题进行了研究并 首先定义CVM,假设目标在时刻k的状态由平 提出一种基于扫描点匹配的解决方法,由于该方法采 面笛卡尔坐标xCM和y以及在X、Y轴方向上 用的是最近点迭代(ICP)匹配算法,因此无法表示机 的速度M和M组成,即 器人和目标的不确定性.赵璇等3]提出了一种基于 XIVMCVM yICVMM yCVM] 粒子滤波解决方法,但该方法存在计算量大,以及地 则根据文献[2]介绍的方法可知目标CVM运动模 图长期一致性难以保证的问题4], 式预测函数为 本文提出了一种基于MM的机器人同时定位、 MM(M,AM)= 地图构建和目标跟踪(simultaneous localization and mapping witl汕object tracking,SLAMOT)方法.该方法 AX四Y+9. (2) 将传统的IMM目标追踪算法和基于EKF的SLAM 式中:41为状态转移矩阵,9为目标运动随机 算法相结合,完成了在未知环境下对机器人轨迹和 参量,其符合方差阵为Q的高斯白噪声, 目标轨迹的同时估计.仿真实验表明该方法对机器 对于CAM来说,目标的状态为xCW= 人轨迹、目标轨迹以及目标运动模态估计均较为准 [x4y“],其中和 确,并且由于系统所有状态向量均存在相关性,因此 A分别为目标在X、Y轴方向上的加速度,类似于 能够保证较好的地图长期一致性. CVM可以将CAM目标状态转移函数表示为 1机器人和目标的运动模型以及观测 MA(MAM) 模型 Ax4+9. (3) 式中:4为状态转移矩阵,q为目标运动随机 本节主要介绍系统所涉及到的相关运动模型以 参量,其符合方差阵为Q的高斯白噪声,限于篇 及观测模型,在机器人同时定位、地图构建和目标跟 幅,这里对这些参数的具体取值不予介绍,读者可参 踪过程中首先需要建立机器人和目标的运动模型, 见文献[2],图1显示了利用式(2)、(3)得到的目标 分别介绍如下 运行轨迹。 1.1机器人运动模型 18 CVM 设机器人状态为X=[xy],其中x、、 分别为k时刻机器人在全局坐标系下的平面笛卡尔坐 10 标以及相对于X轴的转角(标号上标表示描述对象,下 6 标表示时间).k-1=[k-1%-1]为k-1时刻机器人 2 的速度、角度控制量,“k-1存在均值为0、方差为Q的 0 -6 - 68 X/m 高斯噪声,则机器人运动模型如下: X=(X1,8-1,△t)= (a)CVM模态运行轨迹