正在加载图片...
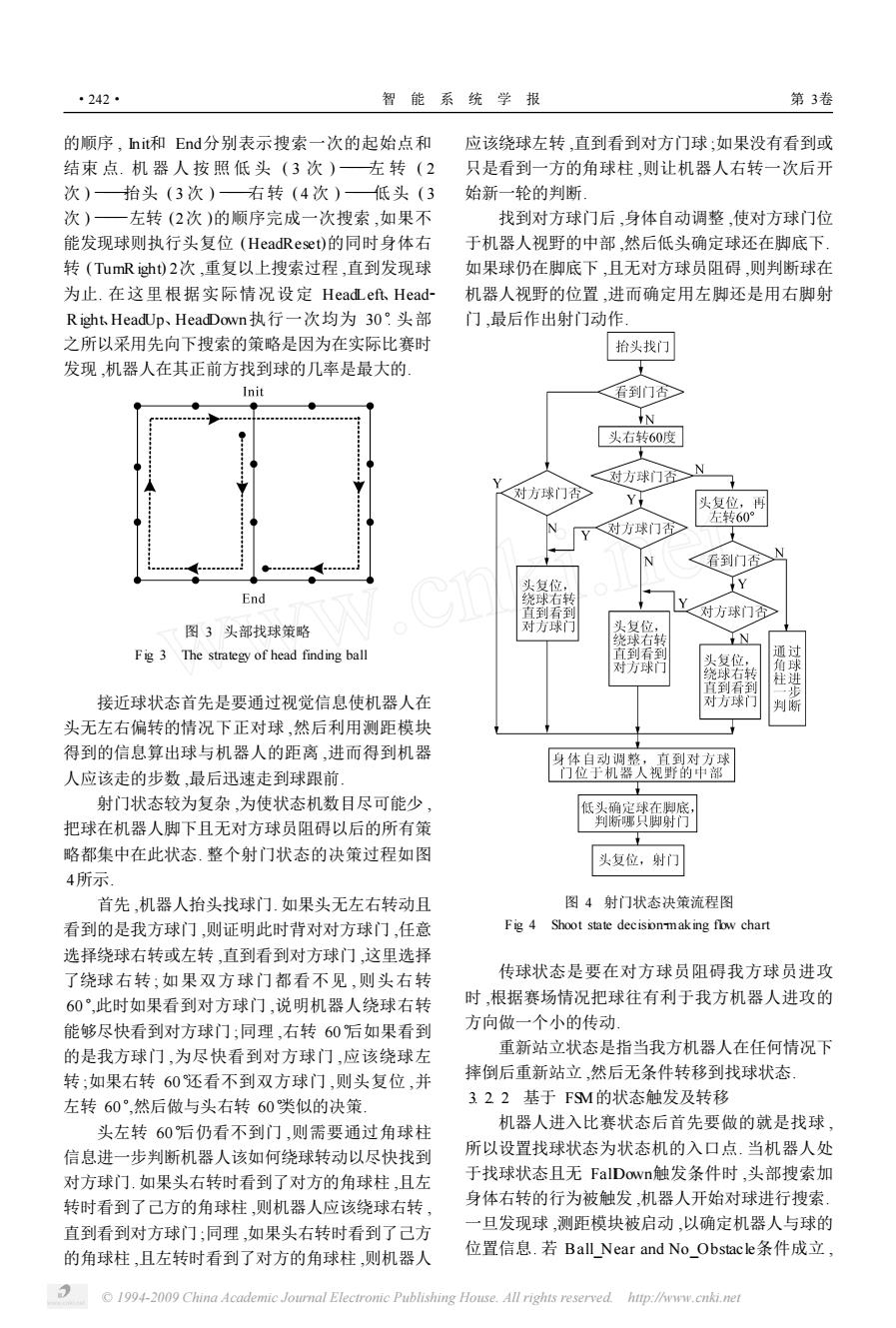
·242- 智能系统学报 第3卷 的顺序,nit和End分别表示搜索一次的起始点和 应该绕球左转,直到看到对方门球;如果没有看到或 结束点.机器人按照低头(3次)—左转(2 只是看到一方的角球柱,则让机器人右转一次后开 次)抬头(3次)右转(4次)低头(3 始新一轮的判断 次)一左转(2次)的顺序完成一次搜索,如果不 找到对方球门后,身体自动调整,使对方球门位 能发现球则执行头复位(HeadRese)的同时身体右 于机器人视野的中部,然后低头确定球还在脚底下 转(TumR ight)2次,重复以上搜索过程,直到发现球 如果球仍在脚底下,且无对方球员阻碍,则判断球在 为止.在这里根据实际情况设定HeadLeft、Head- 机器人视野的位置,进而确定用左脚还是用右脚射 R ight.HeadUp、HeadDown执行一次均为30:头部 门,最后作出射门动作 之所以采用先向下搜索的策略是因为在实际比赛时 拾头找门 发现,机器人在其正前方找到球的几率是最大的 Init 看到门否 头右转60度 对方球门否 N 对方球门 Y 头复位,再 左转60° N 对方球门 N 看到门否N 头复位 Y End 绕球右转 Y 直到看到 对方球门 图3头部找球策略 对方球门 头复位 绕球右转 N Fig 3 The strategy of head finding ball 直到看到 通过 对方球门 头复位 角球 绕球右转 直到看到 接近球状态首先是要通过视觉信息使机器人在 对方球 判断 头无左右偏转的情况下正对球,然后利用测距模块 得到的信息算出球与机器人的距离,进而得到机器 身体自动调整,直到对方球 人应该走的步数,最后迅速走到球跟前 门位于机器人视野的中部 射门状态较为复杂,为使状态机数目尽可能少 低头确定球在脚底, 把球在机器人脚下且无对方球员阻碍以后的所有策 判断哪只脚射门 略都集中在此状态.整个射门状态的决策过程如图 头复位,射门 4所示. 首先,机器人抬头找球门.如果头无左右转动且 图4射门状态决策流程图 看到的是我方球门,则证明此时背对对方球门,任意 Fig 4 Shoot state decisionmaking fow chart 选择绕球右转或左转,直到看到对方球门,这里选择 了绕球右转:如果双方球门都看不见,则头右转 传球状态是要在对方球员阻碍我方球员进攻 60°,此时如果看到对方球门,说明机器人绕球右转 时,根据赛场情况把球往有利于我方机器人进攻的 能够尽快看到对方球门:同理,右转60后如果看到 方向做一个小的传动 的是我方球门,为尽快看到对方球门,应该绕球左 重新站立状态是指当我方机器人在任何情况下 转;如果右转60还看不到双方球门,则头复位,并 摔倒后重新站立,然后无条件转移到找球状态 左转60°,然后做与头右转60类似的决策 322基于F9M的状态触发及转移 头左转60后仍看不到门,则需要通过角球柱 机器人进入比赛状态后首先要做的就是找球」 信息进一步判断机器人该如何绕球转动以尽快找到 所以设置找球状态为状态机的入口点.当机器人处 对方球门.如果头右转时看到了对方的角球柱,且左 于找球状态且无FalDowni触发条件时,头部搜索加 转时看到了己方的角球柱,则机器人应该绕球右转, 身体右转的行为被触发,机器人开始对球进行搜索 直到看到对方球门:同理,如果头右转时看到了己方 一旦发现球,测距模块被启动,以确定机器人与球的 的角球柱,且左转时看到了对方的角球柱,则机器人 位置信息.若Ball Near and No_Obstacle条件成立, 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved http://www.cnki.net的顺序 , Init和 End分别表示搜索一次的起始点和 结束 点. 机 器 人 按 照 低 头 ( 3 次 ) ———左 转 ( 2 次 ) ———抬头 ( 3 次 ) ———右转 ( 4 次 ) ———低头 ( 3 次 ) ———左转 (2次 )的顺序完成一次搜索 ,如果不 能发现球则执行头复位 (HeadReset)的同时身体右 转 (TurnRight) 2次 ,重复以上搜索过程 ,直到发现球 为止. 在这里根据实际情况设定 HeadLeft、Head2 Right、HeadUp、HeadDown执行一次均为 30°. 头部 之所以采用先向下搜索的策略是因为在实际比赛时 发现 ,机器人在其正前方找到球的几率是最大的. 图 3 头部找球策略 Fig. 3 The strategy of head finding ball 接近球状态首先是要通过视觉信息使机器人在 头无左右偏转的情况下正对球 ,然后利用测距模块 得到的信息算出球与机器人的距离 ,进而得到机器 人应该走的步数 ,最后迅速走到球跟前. 射门状态较为复杂 ,为使状态机数目尽可能少 , 把球在机器人脚下且无对方球员阻碍以后的所有策 略都集中在此状态. 整个射门状态的决策过程如图 4所示. 首先 ,机器人抬头找球门. 如果头无左右转动且 看到的是我方球门 ,则证明此时背对对方球门 ,任意 选择绕球右转或左转 ,直到看到对方球门 ,这里选择 了绕球右转 ; 如果双方球门都看不见 ,则头右转 60°,此时如果看到对方球门 ,说明机器人绕球右转 能够尽快看到对方球门 ;同理 ,右转 60°后如果看到 的是我方球门 ,为尽快看到对方球门 ,应该绕球左 转 ;如果右转 60°还看不到双方球门 ,则头复位 ,并 左转 60°,然后做与头右转 60°类似的决策. 头左转 60°后仍看不到门 ,则需要通过角球柱 信息进一步判断机器人该如何绕球转动以尽快找到 对方球门. 如果头右转时看到了对方的角球柱 ,且左 转时看到了己方的角球柱 ,则机器人应该绕球右转 , 直到看到对方球门 ;同理 ,如果头右转时看到了己方 的角球柱 ,且左转时看到了对方的角球柱 ,则机器人 应该绕球左转 ,直到看到对方门球 ;如果没有看到或 只是看到一方的角球柱 ,则让机器人右转一次后开 始新一轮的判断. 找到对方球门后 ,身体自动调整 ,使对方球门位 于机器人视野的中部 ,然后低头确定球还在脚底下. 如果球仍在脚底下 ,且无对方球员阻碍 ,则判断球在 机器人视野的位置 ,进而确定用左脚还是用右脚射 门 ,最后作出射门动作. 图 4 射门状态决策流程图 Fig. 4 Shoot state decision2making flow chart 传球状态是要在对方球员阻碍我方球员进攻 时 ,根据赛场情况把球往有利于我方机器人进攻的 方向做一个小的传动. 重新站立状态是指当我方机器人在任何情况下 摔倒后重新站立 ,然后无条件转移到找球状态. 3. 2. 2 基于 FSM的状态触发及转移 机器人进入比赛状态后首先要做的就是找球 , 所以设置找球状态为状态机的入口点. 当机器人处 于找球状态且无 FallDown触发条件时 ,头部搜索加 身体右转的行为被触发 ,机器人开始对球进行搜索. 一旦发现球 ,测距模块被启动 ,以确定机器人与球的 位置信息. 若 Ball_Near and No_Obstacle条件成立 , ·242· 智 能 系 统 学 报 第 3卷 © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net