正在加载图片...
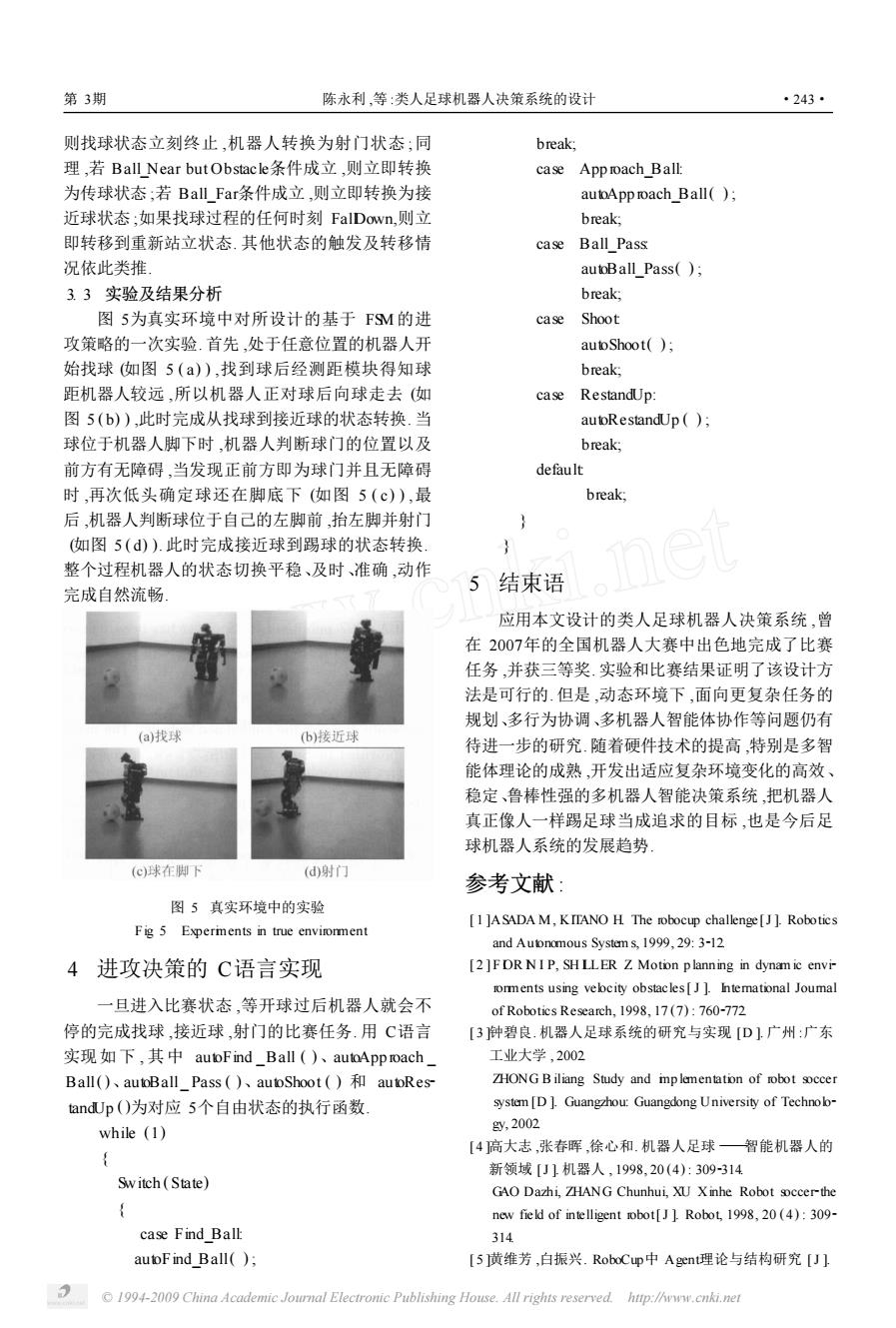
第3期 陈永利,等:类人足球机器人决策系统的设计 ·243· 则找球状态立刻终止,机器人转换为射门状态;同 break: 理,若Ball Near but Obstacle条件成立,则立即转换 case Approach_Ball: 为传球状态;若Ball Far条件成立,则立即转换为接 autoApproach Ball(); 近球状态;如果找球过程的任何时刻FalDown,则立 break; 即转移到重新站立状态.其他状态的触发及转移情 case Ball Pass 况依此类推」 autoBall Pass(); 3.3实验及结果分析 break: 图5为真实环境中对所设计的基于F9M的进 case Shoot 攻策略的一次实验.首先,处于任意位置的机器人开 autoShoot(); 始找球(如图5(a),找到球后经测距模块得知球 break; 距机器人较远,所以机器人正对球后向球走去(如 case RestandUp: 图5(b)),此时完成从找球到接近球的状态转换.当 autoRestandUp () 球位于机器人脚下时,机器人判断球门的位置以及 break: 前方有无障碍,当发现正前方即为球门并且无障碍 default 时,再次低头确定球还在脚底下(如图5(c)),最 break: 后,机器人判断球位于自己的左脚前,抬左脚并射门 如图5(d)).此时完成接近球到踢球的状态转换. 整个过程机器人的状态切换平稳、及时、准确,动作 5结束语 完成自然流畅 应用本文设计的类人足球机器人决策系统,曾 在2007年的全国机器人大赛中出色地完成了比赛 任务,并获三等奖.实验和比赛结果证明了该设计方 法是可行的.但是,动态环境下,面向更复杂任务的 规划、多行为协调、多机器人智能体协作等问题仍有 (a)找球 (b)接近球 待进一步的研究.随着硬件技术的提高,特别是多智 能体理论的成熟,开发出适应复杂环境变化的高效、 稳定、鲁棒性强的多机器人智能决策系统,把机器人 真正像人一样踢足球当成追求的目标,也是今后足 球机器人系统的发展趋势 (C)球在脚下 (d)射门 参考文献: 图5真实环境中的实验 [1 ]ASADA M,KITANO H The robocup challenge [J].Robotics Fig 5 Experments in true enviromment and Autonomous System s,1999,29:3-12 4进攻决策的C语言实现 [2]FDR NI P,SH LLER Z Motion planning in dynam ic envi- rorments using velocity obstacles [J ]Intemational Joumal 一旦进入比赛状态,等开球过后机器人就会不 of Robotics Research,1998,17(7):760-772 停的完成找球,接近球,射门的比赛任务.用C语言 [3钟碧良.机器人足球系统的研究与实现[D]广州:广东 实现如下,其中autoFind_Bal()、autoApproach 工业大学,2002 Ball()、autoBall Pass()、autoShoot()和autoRes- ZHONG Biliang Study and mplementation of robot soccer tandUp()为对应5个自由状态的执行函数 system [D].Guangzhou:Guangdong University of Technob- while (1) y,2002 [4高大志,张春晖,徐心和.机器人足球智能机器人的 { 新领域[J1机器人,1998,20(4):309-314 Switch State) GAO Dazhi,ZHANG Chunhui,XU Xinhe Robot soccer-the new field of intelligent robot[J]Robot 1998,20(4):309- case Find Ball 314 autoFind Ball() [5黄维芳,白振兴.RoboCup中Agnt理论与结构研究[J] 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved http://www.cnki.net则找球状态立刻终止 ,机器人转换为射门状态 ;同 理 ,若 Ball_Near but Obstacle条件成立 ,则立即转换 为传球状态 ;若 Ball_Far条件成立 ,则立即转换为接 近球状态 ;如果找球过程的任何时刻 FallDown,则立 即转移到重新站立状态. 其他状态的触发及转移情 况依此类推. 3. 3 实验及结果分析 图 5为真实环境中对所设计的基于 FSM 的进 攻策略的一次实验. 首先 ,处于任意位置的机器人开 始找球 (如图 5 ( a) ) ,找到球后经测距模块得知球 距机器人较远 ,所以机器人正对球后向球走去 (如 图 5 ( b) ) ,此时完成从找球到接近球的状态转换. 当 球位于机器人脚下时 ,机器人判断球门的位置以及 前方有无障碍 ,当发现正前方即为球门并且无障碍 时 ,再次低头确定球还在脚底下 (如图 5 ( c) ) ,最 后 ,机器人判断球位于自己的左脚前 ,抬左脚并射门 (如图 5 ( d) ). 此时完成接近球到踢球的状态转换. 整个过程机器人的状态切换平稳、及时、准确 ,动作 完成自然流畅. 图 5 真实环境中的实验 Fig. 5 Experiments in true environment 4 进攻决策的 C语言实现 一旦进入比赛状态 ,等开球过后机器人就会不 停的完成找球 ,接近球 ,射门的比赛任务. 用 C语言 实现如下 , 其中 autoFind _Ball ( )、autoApp roach _ Ball()、autoBall _Pass ( )、autoShoot ( ) 和 autoRes2 tandUp ()为对应 5个自由状态的执行函数. while (1) { Switch (State) { case Find_Ball: autoFind_Ball( ) ; break; case App roach_Ball: autoApp roach_Ball( ) ; break; case Ball_Pass: autoBall_Pass( ) ; break; case Shoot: autoShoot( ) ; break; case RestandUp: autoRestandUp ( ) ; break; default: break; } } 5 结束语 应用本文设计的类人足球机器人决策系统 ,曾 在 2007年的全国机器人大赛中出色地完成了比赛 任务 ,并获三等奖. 实验和比赛结果证明了该设计方 法是可行的. 但是 ,动态环境下 ,面向更复杂任务的 规划、多行为协调、多机器人智能体协作等问题仍有 待进一步的研究. 随着硬件技术的提高 ,特别是多智 能体理论的成熟 ,开发出适应复杂环境变化的高效、 稳定、鲁棒性强的多机器人智能决策系统 ,把机器人 真正像人一样踢足球当成追求的目标 ,也是今后足 球机器人系统的发展趋势. 参考文献 : [ 1 ]ASADA M, KITANO H. The robocup challenge[J ]. Robotics and Autonomous Systems, 1999, 29: 3212. [ 2 ] F IOR IN I P, SH ILLER Z. Motion p lanning in dynamic envi2 ronments using velocity obstacles[ J ]. International Journal of Robotics Research, 1998, 17 (7) : 7602772. [ 3 ]钟碧良. 机器人足球系统的研究与实现 [D ]. 广州 :广东 工业大学 , 2002. ZHONG Biliang. Study and imp lementation of robot soccer system [D ]. Guangzhou: Guangdong University of Technolo2 gy, 2002. [ 4 ]高大志 ,张春晖 ,徐心和. 机器人足球 ———智能机器人的 新领域 [J ]. 机器人 , 1998, 20 (4) : 3092314. GAO Dazhi, ZHANG Chunhui, XU Xinhe. Robot soccer2the new field of intelligent robot[J ]. Robot, 1998, 20 ( 4) : 3092 314. [ 5 ]黄维芳 ,白振兴. RoboCup中 Agent理论与结构研究 [J ]. 第 3期 陈永利 ,等 :类人足球机器人决策系统的设计 ·243· © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net