正在加载图片...
Perpendicular distance Preprocess Determine Determine package orientation package stacking RF Angle compuation (single) (multiple) Signals Angle smoothing T ·Bottom/top face Relative stacking Lincar fitin Rotation angle situation 2 Moving Fig.7. Architecture of RF-3DScan 0 Equal angle Perpendicular A distance between two zero points just reflects the tags'perpendicular point point points separation.In addition,the intersection of the two lines Fig.5. Metrics for the angle profiles represents the position where the tags are projected on the cota same line with the antenna,corresponding to the equal angle point.Specially,the smaller h is,the larger is,and the Equal angle point sharper the line is.As the h of Ti is smaller than T2,thelkll T2 of Ti is larger,so the line of Ti decreases faster than T2. Perpendicular point For a certain tag,its angle profile records its angles at T Moving different positions.Note that,for analyzing the change of distance the angles,it is the separation between the positions and Fig.6.Model of the angle profiles the corresponding change of cot o that matter,so the moved antenna and the two tags are in the same line,so n and 72 distance l does not necessarily the actual moved distance of the share the same angle.Before equal point,the angle of Ti is antenna.That is,we have no constrict to the coordinates of the smaller than the angle of T2.On the contrary,the angle of T positions,as long as they refer to the same basis.For example, changes to be bigger than that of T2 after the equal angle point. let the antenna moves at a constant speed,and set a random No matter for T or T2,its angle increases continuously during time as the starting moving time.When the antenna collects the antenna moving process,so it is obvious that the angle of phase during the moving process,it records the corresponding time as well,then that position can be estimated with the Ti changes faster than that of T2.Such phenomenon is due to the smaller perpendicular distance of T1.Thus,according time interval and the constant moving speed.So,in Eq.4, to the angle change rate,we can determine the tags'relative the angle a and the moved distance I are known parameters, positions along the perpendicular direction. there're two remaining unknown parameters:h and lo,which can be estimated by linear fitting with multiple angles during D.Model of Angle Profile the moving process in the angle profile.Meanwhile,lo depends To depict the angle-profile-based measurement metrics in on when the antenna passes through the tag.For different mathematics,we build a linear model to derive the metrics tags,the antenna start point should be the same one (as they from the angle profile automatically.Considering Fig.4,the share the same starting time),so the larger lo is.the later that angle-of-arrival can be expressed as: line reaches 0,and the tag is more ahead along the antenna cot a=y-yA moving direction.Thus,by leveraging these properties,we can (3) h determine the tags'relative positions,as: where cot means the cotangent function,h is the perpendicular 1)The value of reflects the perpendicular distance from distance between the tag and the antenna moving trace.yA the tag to the antenna moving trace:the larger is, and yv represent the coordinates of point A and V along the the smaller the perpendicular distance is. antenna moving direction.Assume there is an antenna start 2)The value of lo determines the projected position of the point S,the distance from S to V is lo,the antenna moved corresponding tag along the antenna moving direction. distance be 1.Thus,(lo-l)represents the distance from the The difference of lo between two tags indicates their antenna to the perpendicular point (same as (yv-yA)),the interval in the antenna moving direction. angle can be rewritten as: IV.SYSTEM OVERVIEW cot a=kl +b,k = h6= lo (4) RF-3DScan is a 3D reconstruction system for tagged pack- h ages via RFID technology.For RF-3DScan,the geometry where the scope k is related to the minus reciprocal of h,the relationships of the tags attached on a single package is known intercept b depends on the ratio of lo and h. as priori and the tag deployment obeys two important rules. Taking the tags in Fig.5,the transformed angle expression Also,we make the following assumptions:1)The antenna using Eq.4 should look like the lines shown in Fig.6.As I moves at a constant speed;2)Each package is a standard cube. increases continuously during the moving process,o increases and they are fully on the ground or parallel to the ground (on as well.When the antenna reaches the perpendicular point, the ground is the special case of parallel to the ground). a is equal to /2,so cota =0.The line of T reaches Fig.7 illustrates the architecture of RF-3DScan.RF-3DScan 0 earlier than T2.Thus,the order of such zero points are takes the RF-signals from the tags as input,then outputs 3D corresponding to the tags perpendicular points,and the spacing profiles for multiple packages.The whole system consistsଵߙ ଶߙ ଵԢߙ ଶԢߙ
݄ଶ
݄ଵ ܶଶ ܶଵ ܣ ܱ Fig. 5. Metrics for the angle profiles ܶଶ ܶଵ ߙ
Ͳ
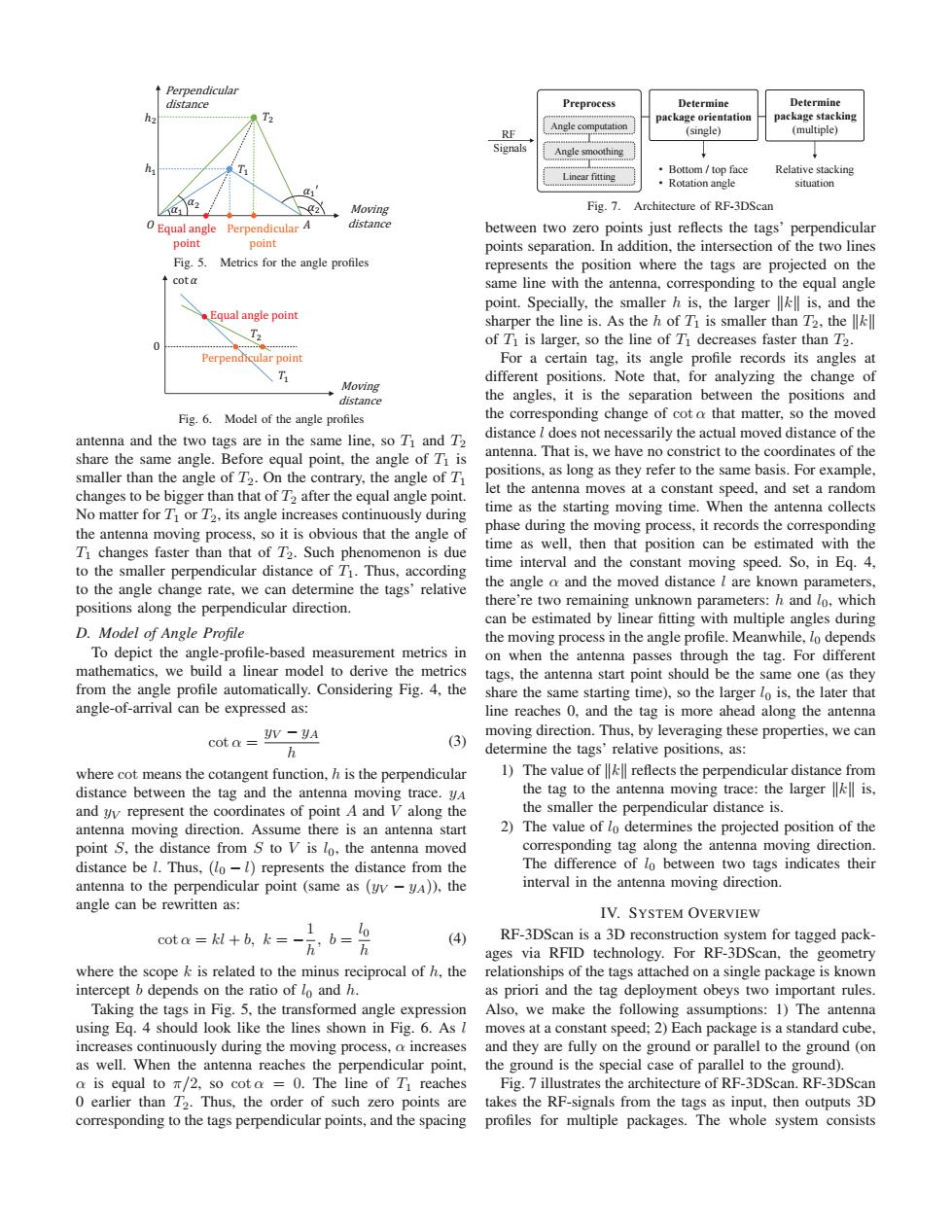
Fig. 6. Model of the angle profiles antenna and the two tags are in the same line, so T1 and T2 share the same angle. Before equal point, the angle of T1 is smaller than the angle of T2. On the contrary, the angle of T1 changes to be bigger than that of T2 after the equal angle point. No matter for T1 or T2, its angle increases continuously during the antenna moving process, so it is obvious that the angle of T1 changes faster than that of T2. Such phenomenon is due to the smaller perpendicular distance of T1. Thus, according to the angle change rate, we can determine the tags’ relative positions along the perpendicular direction. D. Model of Angle Profile To depict the angle-profile-based measurement metrics in mathematics, we build a linear model to derive the metrics from the angle profile automatically. Considering Fig. 4, the angle-of-arrival can be expressed as: cot α = yV − yA h (3) where cot means the cotangent function, h is the perpendicular distance between the tag and the antenna moving trace. yA and yV represent the coordinates of point A and V along the antenna moving direction. Assume there is an antenna start point S, the distance from S to V is l0, the antenna moved distance be l. Thus, (l0 − l) represents the distance from the antenna to the perpendicular point (same as (yV − yA)), the angle can be rewritten as: cot α = kl + b, k = − 1 h, b = l0 h (4) where the scope k is related to the minus reciprocal of h, the intercept b depends on the ratio of l0 and h. Taking the tags in Fig. 5, the transformed angle expression using Eq. 4 should look like the lines shown in Fig. 6. As l increases continuously during the moving process, α increases as well. When the antenna reaches the perpendicular point, α is equal to π/2, so cot α = 0. The line of T1 reaches 0 earlier than T2. Thus, the order of such zero points are corresponding to the tags perpendicular points, and the spacing 3UHSURFHVV $QJOHFRPSXWDWLRQ /LQHDUILWWLQJ $QJOHVPRRWKLQJ 5) 6LJQDOV 'HWHUPLQH SDFNDJHRULHQWDWLRQ
VLQJOH
'HWHUPLQH SDFNDJHVWDFNLQJ
PXOWLSOH
%RWWRPWRSIDFH 5RWDWLRQDQJOH 5HODWLYHVWDFNLQJ VLWXDWLRQ Fig. 7. Architecture of RF-3DScan between two zero points just reflects the tags’ perpendicular points separation. In addition, the intersection of the two lines represents the position where the tags are projected on the same line with the antenna, corresponding to the equal angle point. Specially, the smaller h is, the larger k is, and the sharper the line is. As the h of T1 is smaller than T2, the k of T1 is larger, so the line of T1 decreases faster than T2. For a certain tag, its angle profile records its angles at different positions. Note that, for analyzing the change of the angles, it is the separation between the positions and the corresponding change of cot α that matter, so the moved distance l does not necessarily the actual moved distance of the antenna. That is, we have no constrict to the coordinates of the positions, as long as they refer to the same basis. For example, let the antenna moves at a constant speed, and set a random time as the starting moving time. When the antenna collects phase during the moving process, it records the corresponding time as well, then that position can be estimated with the time interval and the constant moving speed. So, in Eq. 4, the angle α and the moved distance l are known parameters, there’re two remaining unknown parameters: h and l0, which can be estimated by linear fitting with multiple angles during the moving process in the angle profile. Meanwhile, l0 depends on when the antenna passes through the tag. For different tags, the antenna start point should be the same one (as they share the same starting time), so the larger l0 is, the later that line reaches 0, and the tag is more ahead along the antenna moving direction. Thus, by leveraging these properties, we can determine the tags’ relative positions, as: 1) The value of k reflects the perpendicular distance from the tag to the antenna moving trace: the larger k is, the smaller the perpendicular distance is. 2) The value of l0 determines the projected position of the corresponding tag along the antenna moving direction. The difference of l0 between two tags indicates their interval in the antenna moving direction. IV. SYSTEM OVERVIEW RF-3DScan is a 3D reconstruction system for tagged packages via RFID technology. For RF-3DScan, the geometry relationships of the tags attached on a single package is known as priori and the tag deployment obeys two important rules. Also, we make the following assumptions: 1) The antenna moves at a constant speed; 2) Each package is a standard cube, and they are fully on the ground or parallel to the ground (on the ground is the special case of parallel to the ground). Fig. 7 illustrates the architecture of RF-3DScan. RF-3DScan takes the RF-signals from the tags as input, then outputs 3D profiles for multiple packages. The whole system consists������������������������������������������