正在加载图片...
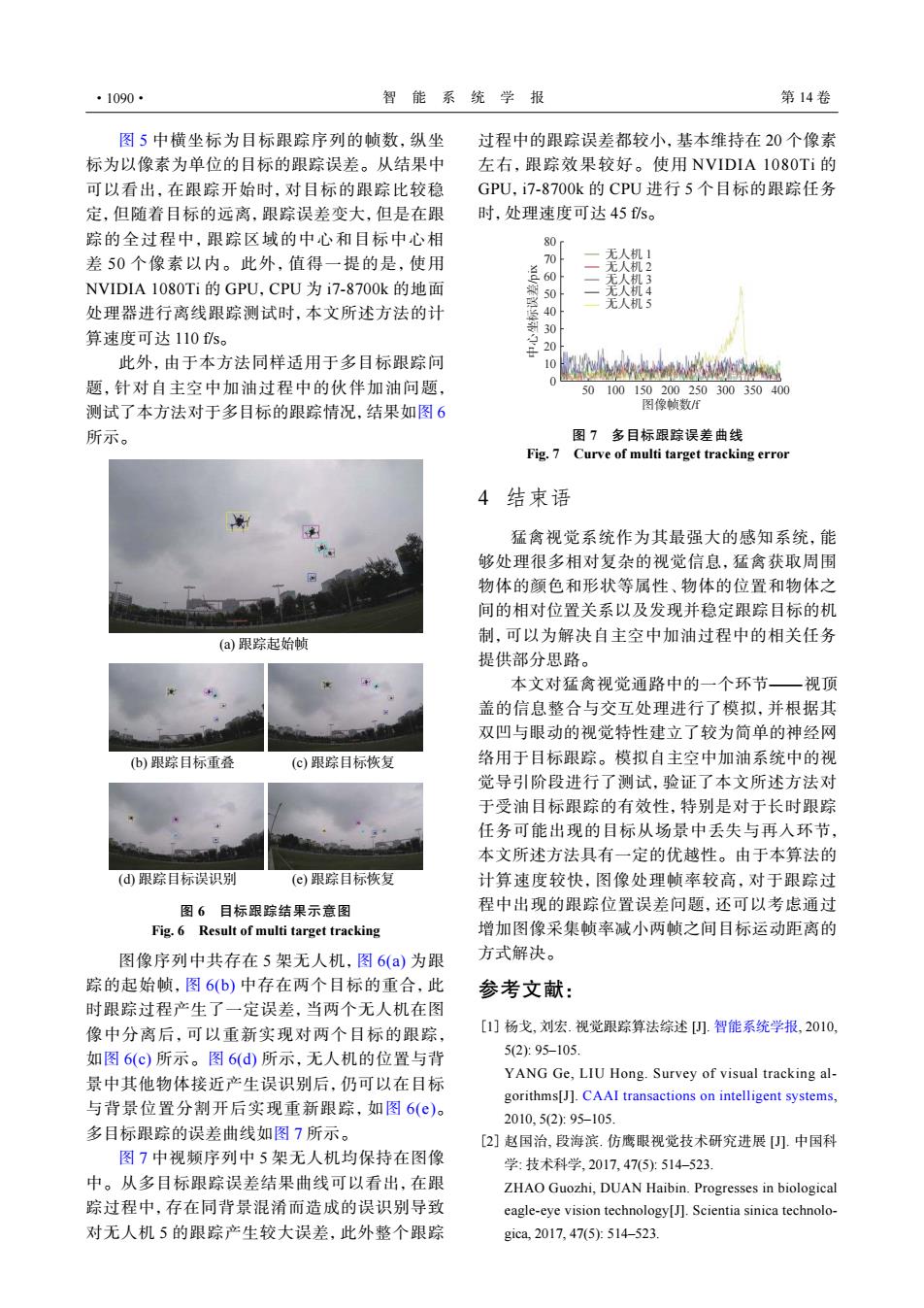
·1090· 智能系统学报 第14卷 图5中横坐标为目标跟踪序列的帧数,纵坐 过程中的跟踪误差都较小,基本维持在20个像素 标为以像素为单位的目标的跟踪误差。从结果中 左右,跟踪效果较好。使用NVIDIA1080Ti的 可以看出,在跟踪开始时,对目标的跟踪比较稳 GPU,i7-8700k的CPU进行5个目标的跟踪任务 定,但随着目标的远离,跟踪误差变大,但是在跟 时,处理速度可达45fs。 踪的全过程中,跟踪区域的中心和目标中心相 0 0 无人机1 差50个像素以内。此外,值得一提的是,使用 人机2 NVIDIA1080Ti的GPU,CPU为i7-8700k的地面 50 处理器进行离线跟踪测试时,本文所述方法的计 40 无人机5 算速度可达110fs。 30 20 此外,由于本方法同样适用于多目标跟踪问 10 题,针对自主空中加油过程中的伙伴加油问题, 50100150200250300350400 测试了本方法对于多目标的跟踪情况,结果如图6 图像帧数作 所示。 图7多目标跟踪误差曲线 Fig.7 Curve of multi target tracking error 4结束语 猛禽视觉系统作为其最强大的感知系统,能 够处理很多相对复杂的视觉信息,猛禽获取周围 物体的颜色和形状等属性、物体的位置和物体之 间的相对位置关系以及发现并稳定跟踪目标的机 (a)跟踪起始帧 制,可以为解决自主空中加油过程中的相关任务 提供部分思路。 本文对猛禽视觉通路中的一个环节一视顶 盖的信息整合与交互处理进行了模拟,并根据其 双凹与眼动的视觉特性建立了较为简单的神经网 (b)跟踪目标重叠 (c)跟踪目标恢复 络用于目标跟踪。模拟自主空中加油系统中的视 觉导引阶段进行了测试,验证了本文所述方法对 于受油目标跟踪的有效性,特别是对于长时跟踪 任务可能出现的目标从场景中丢失与再人环节, 本文所述方法具有一定的优越性。由于本算法的 (d)跟踪目标误识别 (©)跟踪目标恢复 计算速度较快,图像处理帧率较高,对于跟踪过 图6目标跟踪结果示意图 程中出现的跟踪位置误差问题,还可以考虑通过 Fig.6 Result of multi target tracking 增加图像采集帧率减小两帧之间目标运动距离的 图像序列中共存在5架无人机,图6(a)为跟 方式解决。 踪的起始帧,图6(b)中存在两个目标的重合,此 参考文献: 时跟踪过程产生了一定误差,当两个无人机在图 像中分离后,可以重新实现对两个目标的跟踪, [1]杨戈,刘宏.视觉跟踪算法综述).智能系统学报,2010, 如图6(c)所示。图6(d)所示,无人机的位置与背 5(2):95-105 YANG Ge,LIU Hong.Survey of visual tracking al- 景中其他物体接近产生误识别后,仍可以在目标 与背景位置分割开后实现重新跟踪,如图6(e)。 gorithms[J].CAAI transactions on intelligent systems, 2010,5(2):95-105 多目标跟踪的误差曲线如图7所示。 [2]赵国治,段海滨.仿鹰眼视觉技术研究进展[刀.中国科 图7中视频序列中5架无人机均保持在图像 学:技术科学,2017,47(5):514-523 中。从多目标跟踪误差结果曲线可以看出,在跟 ZHAO Guozhi,DUAN Haibin.Progresses in biological 踪过程中,存在同背景混淆而造成的误识别导致 eagle-eye vision technology[J].Scientia sinica technolo- 对无人机5的跟踪产生较大误差,此外整个跟踪 gica,2017,47(5):514-523图 5 中横坐标为目标跟踪序列的帧数,纵坐 标为以像素为单位的目标的跟踪误差。从结果中 可以看出,在跟踪开始时,对目标的跟踪比较稳 定,但随着目标的远离,跟踪误差变大,但是在跟 踪的全过程中,跟踪区域的中心和目标中心相 差 50 个像素以内。此外,值得一提的是,使用 NVIDIA 1080Ti 的 GPU,CPU 为 i7-8700k 的地面 处理器进行离线跟踪测试时,本文所述方法的计 算速度可达 110 f/s。 此外,由于本方法同样适用于多目标跟踪问 题,针对自主空中加油过程中的伙伴加油问题, 测试了本方法对于多目标的跟踪情况,结果如图 6 所示。 (a) 跟踪起始帧 (b) 跟踪目标重叠 (c) 跟踪目标恢复 (d) 跟踪目标误识别 (e) 跟踪目标恢复 图 6 目标跟踪结果示意图 Fig. 6 Result of multi target tracking 图像序列中共存在 5 架无人机,图 6(a) 为跟 踪的起始帧,图 6(b) 中存在两个目标的重合,此 时跟踪过程产生了一定误差,当两个无人机在图 像中分离后,可以重新实现对两个目标的跟踪, 如图 6(c) 所示。图 6(d) 所示,无人机的位置与背 景中其他物体接近产生误识别后,仍可以在目标 与背景位置分割开后实现重新跟踪,如图 6(e)。 多目标跟踪的误差曲线如图 7 所示。 图 7 中视频序列中 5 架无人机均保持在图像 中。从多目标跟踪误差结果曲线可以看出,在跟 踪过程中,存在同背景混淆而造成的误识别导致 对无人机 5 的跟踪产生较大误差,此外整个跟踪 过程中的跟踪误差都较小,基本维持在 20 个像素 左右,跟踪效果较好。使用 NVIDIA 1080Ti 的 GPU,i7-8700k 的 CPU 进行 5 个目标的跟踪任务 时,处理速度可达 45 f/s。 80 70 60 50 40 30 20 10 0 50 100 150 200 250 300 350 400 图像帧数/f 中心坐标误差/pix 无人机 1 无人机 2 无人机 3 无人机 4 无人机 5 图 7 多目标跟踪误差曲线 Fig. 7 Curve of multi target tracking error 4 结束语 猛禽视觉系统作为其最强大的感知系统,能 够处理很多相对复杂的视觉信息,猛禽获取周围 物体的颜色和形状等属性、物体的位置和物体之 间的相对位置关系以及发现并稳定跟踪目标的机 制,可以为解决自主空中加油过程中的相关任务 提供部分思路。 本文对猛禽视觉通路中的一个环节—视顶 盖的信息整合与交互处理进行了模拟,并根据其 双凹与眼动的视觉特性建立了较为简单的神经网 络用于目标跟踪。模拟自主空中加油系统中的视 觉导引阶段进行了测试,验证了本文所述方法对 于受油目标跟踪的有效性,特别是对于长时跟踪 任务可能出现的目标从场景中丢失与再入环节, 本文所述方法具有一定的优越性。由于本算法的 计算速度较快,图像处理帧率较高,对于跟踪过 程中出现的跟踪位置误差问题,还可以考虑通过 增加图像采集帧率减小两帧之间目标运动距离的 方式解决。 参考文献: 杨戈, 刘宏. 视觉跟踪算法综述 [J]. 智能系统学报, 2010, 5(2): 95–105. YANG Ge, LIU Hong. Survey of visual tracking algorithms[J]. CAAI transactions on intelligent systems, 2010, 5(2): 95–105. [1] 赵国治, 段海滨. 仿鹰眼视觉技术研究进展 [J]. 中国科 学: 技术科学, 2017, 47(5): 514–523. ZHAO Guozhi, DUAN Haibin. Progresses in biological eagle-eye vision technology[J]. Scientia sinica technologica, 2017, 47(5): 514–523. [2] ·1090· 智 能 系 统 学 报 第 14 卷