正在加载图片...
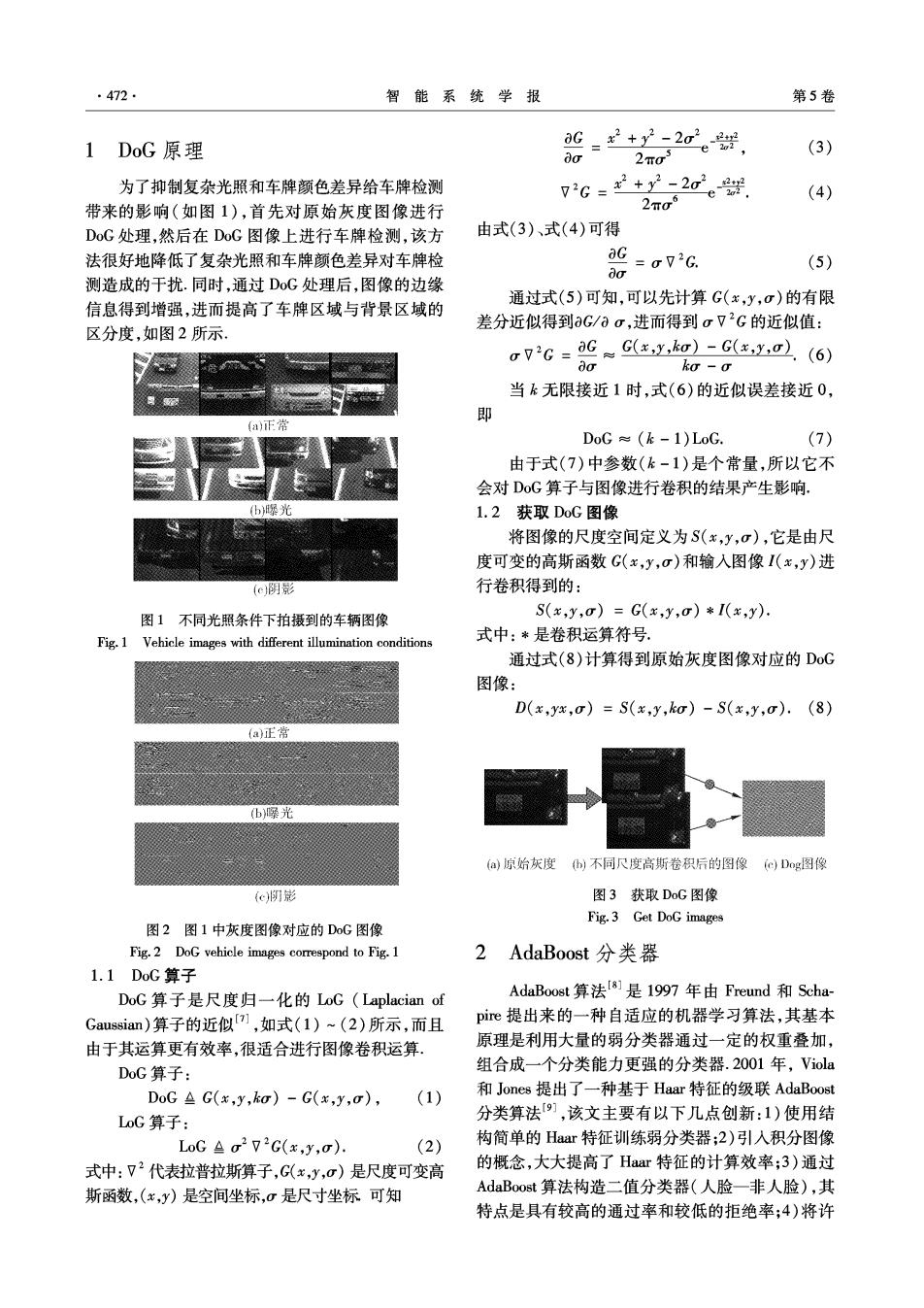
·472· 智能系统学报 第5卷 1DoG原理 G-+y-2a。器, d 2Tos (3) 为了抑制复杂光照和车牌颜色差异给车牌检测 72G=+y2ae器, (4) 带来的影响(如图1),首先对原始灰度图像进行 2To DoG处理,然后在DoG图像上进行车牌检测,该方 由式(3)、式(4)可得 法很好地降低了复杂光照和车牌颜色差异对车牌检 aG =oV2G. (5) d 测造成的于扰.同时,通过DoG处理后,图像的边缘 通过式(5)可知,可以先计算G(x,y,σ)的有限 信息得到增强,进而提高了车牌区域与背景区域的 差分近似得到aG/?o,进而得到σ72G的近似值: 区分度,如图2所示 o7'G=C≈Gx,y,ko)-Gx,y.(6) do ko -0 当k无限接近1时,式(6)的近似误差接近0, 即 (a)正常 DoG≈(k-1)LoG (7) 由于式(7)中参数(k-1)是个常量,所以它不 会对DoG算子与图像进行卷积的结果产生影响, (b曝光 1.2获取DoG图像 将图像的尺度空间定义为S(x,y,σ),它是由尺 度可变的高斯函数G(x,y,σ)和输入图像I(x,y)进 (c)阴影 行卷积得到的: 图1不同光照条件下拍摄到的车辆图像 S(x,y,)=G(x,y,)*I(x,y). Fig.1 Vehicle images with different illumination conditions 式中:*是卷积运算符号 通过式(8)计算得到原始灰度图像对应的DoG 图像: D(x,yx,o)=S(x,y,ko)-S(x,y,).(8) (a)正常 (b曝光 (a)原始灰度)不同尺度高斯卷积后的图像(c)Dg图像 {c阴彪 图3获取DoG图像 Fig.3 Get DoG images 图2图1中灰度图像对应的DoG图像 Fig.2 DoG vehicle images correspond to Fig.1 AdaBoost分类器 2 1.1DoG算子 DoG算子是尺度归一化的LoG(Laplacian of AdaBoost算法8]是1997年由Freund和Scha- Gaussian)算子的近似7,如式(1)~(2)所示,而且 pire提出来的一种自适应的机器学习算法,其基本 由于其运算更有效率,很适合进行图像卷积运算. 原理是利用大量的弱分类器通过一定的权重叠加, DoG算子: 组合成一个分类能力更强的分类器.2001年,Viola DoG A G(x,y,ko)-G(x,y,o), (1) 和Jones提出了一种基于Haar特征的级联AdaBoost LoG算子: 分类算法9,该文主要有以下几点创新:1)使用结 LoG△σ272G(x,y,σ). (2) 构简单的Haar特征训练弱分类器;2)引入积分图像 式中:72代表拉普拉斯算子,G(x,y,o)是尺度可变高 的概念,大大提高了Haar特征的计算效率;3)通过 斯函数,(x,y)是空间坐标,σ是尺寸坐标可知 AdaBoost算法构造二值分类器(人脸一非人脸),其 特点是具有较高的通过率和较低的拒绝率;4)将许