正在加载图片...
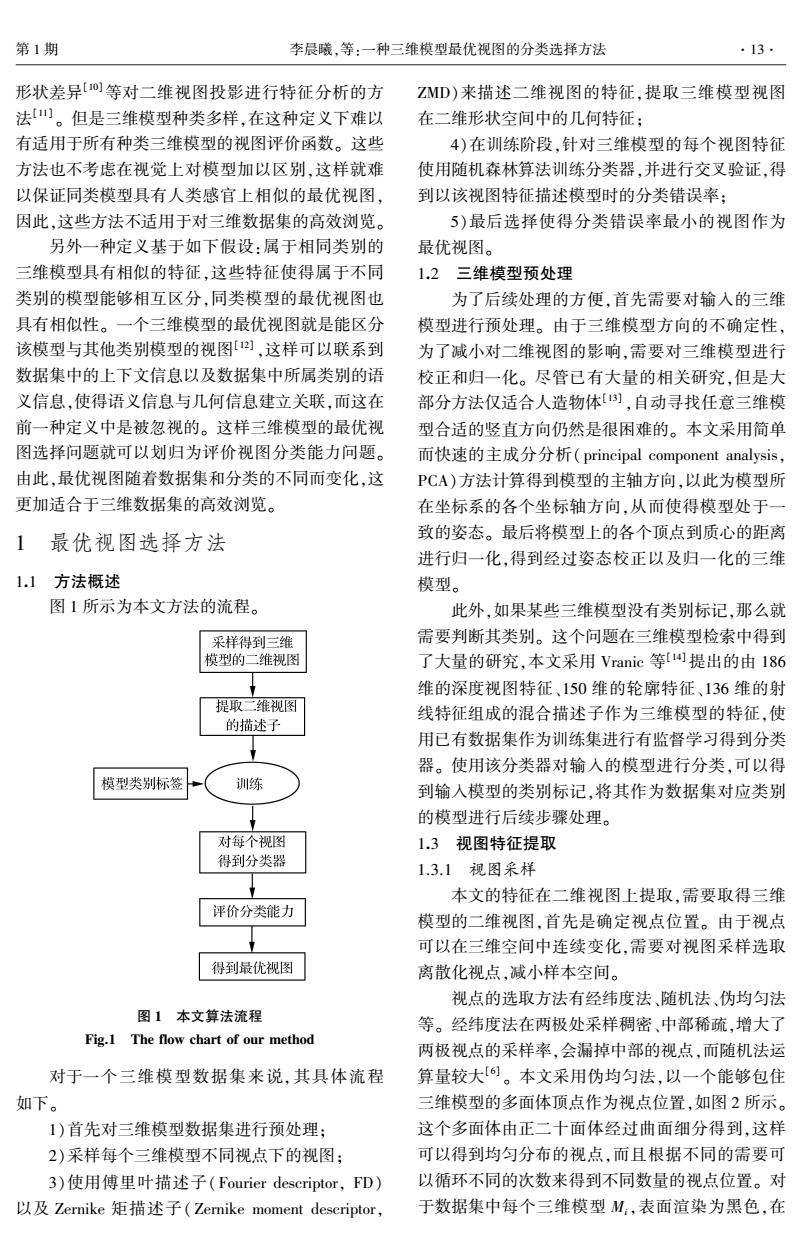
第1期 李晨曦,等:一种三维模型最优视图的分类选择方法 ·13. 形状差异o)等对二维视图投影进行特征分析的方 ZMD)来描述二维视图的特征,提取三维模型视图 法[。但是三维模型种类多样,在这种定义下难以 在二维形状空间中的几何特征; 有适用于所有种类三维模型的视图评价函数。这些 4)在训练阶段,针对三维模型的每个视图特征 方法也不考虑在视觉上对模型加以区别,这样就难 使用随机森林算法训练分类器,并进行交叉验证,得 以保证同类模型具有人类感官上相似的最优视图, 到以该视图特征描述模型时的分类错误率; 因此,这些方法不适用于对三维数据集的高效浏览。 5)最后选择使得分类错误率最小的视图作为 另外一种定义基于如下假设:属于相同类别的 最优视图。 三维模型具有相似的特征,这些特征使得属于不同 1.2三维模型预处理 类别的模型能够相互区分,同类模型的最优视图也 为了后续处理的方便,首先需要对输入的三维 具有相似性。一个三维模型的最优视图就是能区分 模型进行预处理。由于三维模型方向的不确定性, 该模型与其他类别模型的视图],这样可以联系到 为了减小对二维视图的影响,需要对三维模型进行 数据集中的上下文信息以及数据集中所属类别的语 校正和归一化。尽管已有大量的相关研究,但是大 义信息,使得语义信息与几何信息建立关联,而这在 部分方法仅适合人造物体1],自动寻找任意三维模 前一种定义中是被忽视的。这样三维模型的最优视 型合适的竖直方向仍然是很困难的。本文采用简单 图选择问题就可以划归为评价视图分类能力问题。 而快速的主成分分析(principal component analysis, 由此,最优视图随着数据集和分类的不同而变化,这 PCA)方法计算得到模型的主轴方向,以此为模型所 更加适合于三维数据集的高效浏览。 在坐标系的各个坐标轴方向,从而使得模型处于一 1 最优视图选择方法 致的姿态。最后将模型上的各个顶点到质心的距离 进行归一化,得到经过姿态校正以及归一化的三维 1.1方法概述 模型。 图1所示为本文方法的流程。 此外,如果某些三维模型没有类别标记,那么就 采样得到三维 需要判断其类别。这个问题在三维模型检索中得到 模型的二维视图 了大量的研究,本文采用Vranic等[4]提出的由l86 维的深度视图特征、150维的轮廓特征、136维的射 提取二维视图 线特征组成的混合描述子作为三维模型的特征,使 的描述子 用已有数据集作为训练集进行有监督学习得到分类 器。使用该分类器对输入的模型进行分类,可以得 模型类别标签 训练 到输入模型的类别标记,将其作为数据集对应类别 的模型进行后续步骤处理。 对每个视图 1.3视图特征提取 得到分类器 1.3.1视图采样 本文的特征在二维视图上提取,需要取得三维 评价分类能力 模型的二维视图,首先是确定视点位置。由于视点 可以在三维空间中连续变化,需要对视图采样选取 得到最优视图 离散化视点,减小样本空间。 视,点的选取方法有经纬度法、随机法、伪均匀法 图1本文算法流程 等。经纬度法在两极处采样稠密、中部稀疏,增大了 Fig.1 The flow chart of our method 两极视点的采样率,会漏掉中部的视点,而随机法运 对于一个三维模型数据集来说,其具体流程 算量较大6。本文采用伪均匀法,以一个能够包住 如下。 三维模型的多面体顶点作为视点位置,如图2所示。 1)首先对三维模型数据集进行预处理: 这个多面体由正二十面体经过曲面细分得到,这样 2)采样每个三维模型不同视点下的视图; 可以得到均匀分布的视点,而且根据不同的需要可 3)使用傅里叶描述子(Fourier descriptor,FD) 以循环不同的次数来得到不同数量的视点位置。对 以及Zernike矩描述子(Zernike moment descriptor, 于数据集中每个三维模型M:,表面渲染为黑色,在形状差异[10]等对二维视图投影进行特征分析的方 法[11] 。 但是三维模型种类多样,在这种定义下难以 有适用于所有种类三维模型的视图评价函数。 这些 方法也不考虑在视觉上对模型加以区别,这样就难 以保证同类模型具有人类感官上相似的最优视图, 因此,这些方法不适用于对三维数据集的高效浏览。 另外一种定义基于如下假设:属于相同类别的 三维模型具有相似的特征,这些特征使得属于不同 类别的模型能够相互区分,同类模型的最优视图也 具有相似性。 一个三维模型的最优视图就是能区分 该模型与其他类别模型的视图[12] ,这样可以联系到 数据集中的上下文信息以及数据集中所属类别的语 义信息,使得语义信息与几何信息建立关联,而这在 前一种定义中是被忽视的。 这样三维模型的最优视 图选择问题就可以划归为评价视图分类能力问题。 由此,最优视图随着数据集和分类的不同而变化,这 更加适合于三维数据集的高效浏览。 1 最优视图选择方法 1.1 方法概述 图 1 所示为本文方法的流程。 图 1 本文算法流程 Fig.1 The flow chart of our method 对于一个三维模型数据集来说,其具体流程 如下。 1)首先对三维模型数据集进行预处理; 2)采样每个三维模型不同视点下的视图; 3)使用傅里叶描述子( Fourier descriptor, FD) 以及 Zernike 矩描述子( Zernike moment descriptor, ZMD)来描述二维视图的特征,提取三维模型视图 在二维形状空间中的几何特征; 4)在训练阶段,针对三维模型的每个视图特征 使用随机森林算法训练分类器,并进行交叉验证,得 到以该视图特征描述模型时的分类错误率; 5)最后选择使得分类错误率最小的视图作为 最优视图。 1.2 三维模型预处理 为了后续处理的方便,首先需要对输入的三维 模型进行预处理。 由于三维模型方向的不确定性, 为了减小对二维视图的影响,需要对三维模型进行 校正和归一化。 尽管已有大量的相关研究,但是大 部分方法仅适合人造物体[13] ,自动寻找任意三维模 型合适的竖直方向仍然是很困难的。 本文采用简单 而快速的主成分分析( principal component analysis, PCA)方法计算得到模型的主轴方向,以此为模型所 在坐标系的各个坐标轴方向,从而使得模型处于一 致的姿态。 最后将模型上的各个顶点到质心的距离 进行归一化,得到经过姿态校正以及归一化的三维 模型。 此外,如果某些三维模型没有类别标记,那么就 需要判断其类别。 这个问题在三维模型检索中得到 了大量的研究,本文采用 Vranic 等[14] 提出的由 186 维的深度视图特征、150 维的轮廓特征、136 维的射 线特征组成的混合描述子作为三维模型的特征,使 用已有数据集作为训练集进行有监督学习得到分类 器。 使用该分类器对输入的模型进行分类,可以得 到输入模型的类别标记,将其作为数据集对应类别 的模型进行后续步骤处理。 1.3 视图特征提取 1.3.1 视图采样 本文的特征在二维视图上提取,需要取得三维 模型的二维视图,首先是确定视点位置。 由于视点 可以在三维空间中连续变化,需要对视图采样选取 离散化视点,减小样本空间。 视点的选取方法有经纬度法、随机法、伪均匀法 等。 经纬度法在两极处采样稠密、中部稀疏,增大了 两极视点的采样率,会漏掉中部的视点,而随机法运 算量较大[6] 。 本文采用伪均匀法,以一个能够包住 三维模型的多面体顶点作为视点位置,如图 2 所示。 这个多面体由正二十面体经过曲面细分得到,这样 可以得到均匀分布的视点,而且根据不同的需要可 以循环不同的次数来得到不同数量的视点位置。 对 于数据集中每个三维模型 Mi,表面渲染为黑色,在 第 1 期 李晨曦,等:一种三维模型最优视图的分类选择方法 ·13·