正在加载图片...
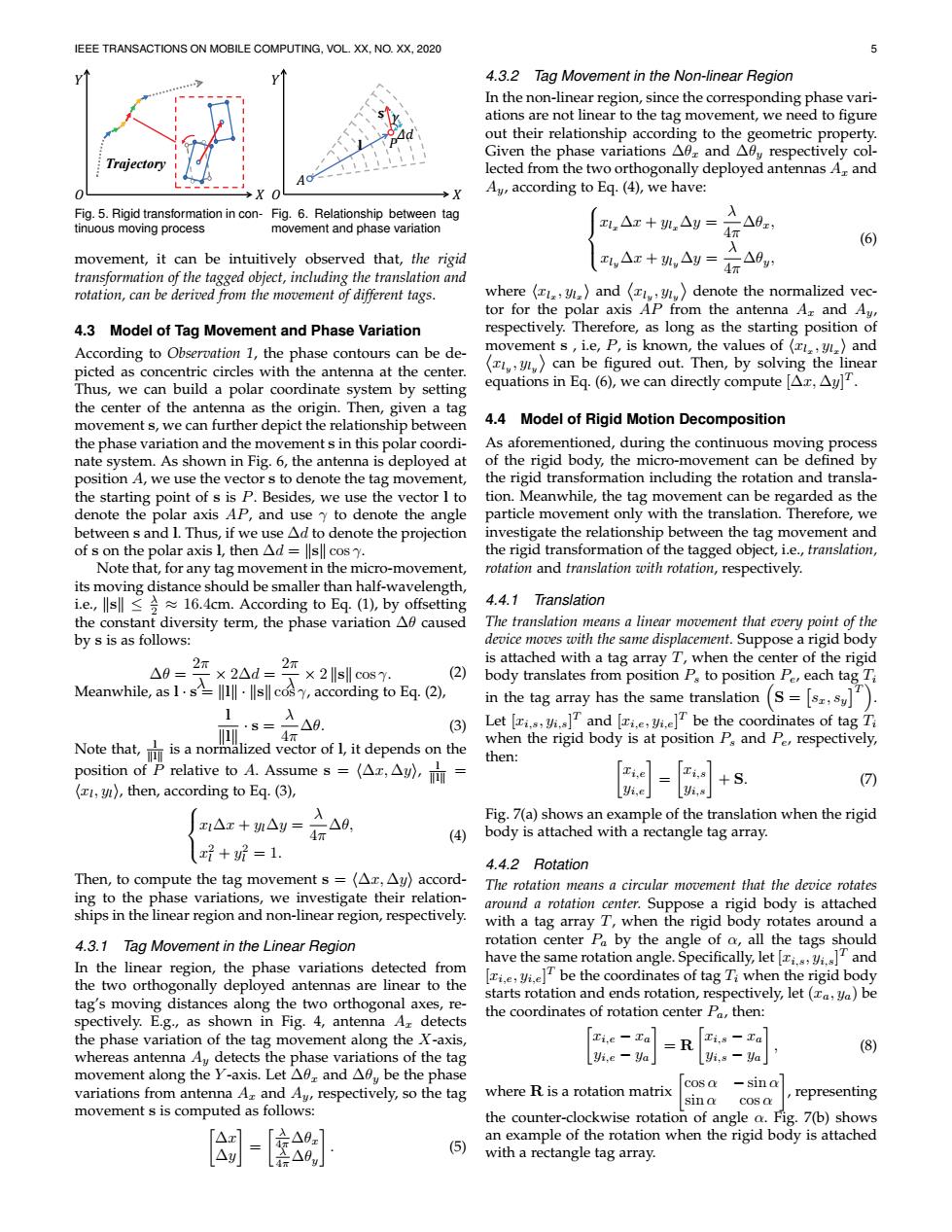
IEEE TRANSACTIONS ON MOBILE COMPUTING,VOL.XX,NO.XX,2020 5 4.3.2 Tag Movement in the Non-linear Region In the non-linear region,since the corresponding phase vari- ations are not linear to the tag movement,we need to figure out their relationship according to the geometric property. Given the phase variations Ar and Aby respectively col- Trajectory lected from the two orthogonally deployed antennas A.and 4 X Ay,according to Eq.(4),we have: Fig.5.Rigid transformation in con-Fig.6.Relationship between tag tinuous moving process movement and phase variation T1△x十△y= 入0r 4π (6 movement,it can be intuitively observed that,the rigid 入9y x,△x+,△y=4 transformation of the tagged object,including the translation and rotation,can be derived from the movement of different tags. where(zlz,.〉and〈rl,h,)denote the normalized vec- tor for the polar axis AP from the antenna A and Ay, 4.3 Model of Tag Movement and Phase Variation respectively.Therefore,as long as the starting position of According to Observation 1,the phase contours can be de- movement s,i.e,P,is known,the values of (,y)and picted as concentric circles with the antenna at the center. can be figured out.Then,by solving the linear Thus,we can build a polar coordinate system by setting equations in Eq.(6),we can directly compute [Ar,Ay]T. the center of the antenna as the origin.Then,given a tag movement s,we can further depict the relationship between 4.4 Model of Rigid Motion Decomposition the phase variation and the movement s in this polar coordi- As aforementioned,during the continuous moving process nate system.As shown in Fig.6,the antenna is deployed at of the rigid body,the micro-movement can be defined by position A,we use the vector s to denote the tag movement, the rigid transformation including the rotation and transla- the starting point of s is P.Besides,we use the vector I to tion.Meanwhile,the tag movement can be regarded as the denote the polar axis AP,and use y to denote the angle particle movement only with the translation.Therefore,we between s and 1.Thus,if we use Ad to denote the projection investigate the relationship between the tag movement and of s on the polar axis 1,then Ad=lls]cosy. the rigid transformation of the tagged object,i.e.,translation, Note that,for any tag movement in the micro-movement, rotation and translation with rotation,respectively. its moving distance should be smaller than half-wavelength, i.e.,lsll≤≥≈l6.4cm.According to Eq.(1),by offsetting 4.4.1 Translation the constant diversity term,the phase variation A caused The translation means a linear movement that every point of the by s is as follows: device moves with the same displacement.Suppose a rigid body 402 ×2Ad=25x×2 silcos7 is attached with a tag array T,when the center of the rigid (2) body translates from position Ps to position Pe,each tag Ti Meanwhile,as 1.s sl cosy,according to Eq.(2), in the tag array has the same translation (ss) 1 1m·sA8. (3)Let and T be the coordinates of tagT Note that,,而 when the rigid body is at position P,and Pe,respectively, is a normalized vector of 1,it depends on the then: position of P relative to A.Assume s=(Az,Ay), 工i,e Ii.s +S. (7) (i,y),then,according to Eq.(3), yi,e yi.s x△x+△y=△, Fig.7(a)shows an example of the translation when the rigid (4) body is attached with a rectangle tag array. x+7=1. 4.4.2 Rotation Then,to compute the tag movement s=(△x,△y)accord- The rotation means a circular movement that the device rotates ing to the phase variations,we investigate their relation- around a rotation center.Suppose a rigid body is attached ships in the linear region and non-linear region,respectively. with a tag array T,when the rigid body rotates around a 4.3.1 Tag Movement in the Linear Region rotation center Pa by the angle of a,all the tags should In the linear region,the phase variations detected from have the same rotation angle.Specifically,letTand the two orthogonally deployed antennas are linear to the [i.e,yi.e]be the coordinates of tag Ti when the rigid body tag's moving distances along the two orthogonal axes,re- starts rotation and ends rotation,respectively,let(a,y)be spectively.E.g,as shown in Fig.4,antenna A detects the coordinates of rotation center Pa,then: the phase variation of the tag movement along the X-axis, Tie-Ta -R Ti,s-Ta (8) whereas antenna Ay detects the phase variations of the tag Yi,e Ya yi,s-Ya movement along the Y-axis.Let A0r and A0u be the phase cosa -sina variations from antenna Az and Ay,respectively,so the tag where R is a rotation matrix sina cosa representing movement s is computed as follows: the counter-clockwise rotation of angle a.Fig.7(b)shows - an example of the rotation when the rigid body is attached (5) with a rectangle tag array.IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. XX, NO. XX, 2020 5 ܺ ܻ Trajectory ܱ ܣ ܲ ܛ ܔ ߛ ݀߂ ܺ ܻ ܱ Fig. 5. Rigid transformation in continuous moving process ܺ ܻ ܣ ܲ ܛ ܔ ߛ ݀߂ ܱ ܣ ܲ ܛ ܔ ߛ ݀߂ ܺ ܻ ܱ Fig. 6. Relationship between tag movement and phase variation movement, it can be intuitively observed that, the rigid transformation of the tagged object, including the translation and rotation, can be derived from the movement of different tags. 4.3 Model of Tag Movement and Phase Variation According to Observation 1, the phase contours can be depicted as concentric circles with the antenna at the center. Thus, we can build a polar coordinate system by setting the center of the antenna as the origin. Then, given a tag movement s, we can further depict the relationship between the phase variation and the movement s in this polar coordinate system. As shown in Fig. 6, the antenna is deployed at position A, we use the vector s to denote the tag movement, the starting point of s is P. Besides, we use the vector l to denote the polar axis AP, and use γ to denote the angle between s and l. Thus, if we use ∆d to denote the projection of s on the polar axis l, then ∆d = ksk cos γ. Note that, for any tag movement in the micro-movement, its moving distance should be smaller than half-wavelength, i.e., ksk ≤ λ 2 ≈ 16.4cm. According to Eq. (1), by offsetting the constant diversity term, the phase variation ∆θ caused by s is as follows: ∆θ = 2π λ × 2∆d = 2π λ × 2 ksk cos γ. (2) Meanwhile, as l · s = klk · ksk cos γ, according to Eq. (2), l klk · s = λ 4π ∆θ. (3) Note that, l klk is a normalized vector of l, it depends on the position of P relative to A. Assume s = h∆x, ∆yi, l klk = hxl , yli, then, according to Eq. (3), xl∆x + yl∆y = λ 4π ∆θ, x 2 l + y 2 l = 1. (4) Then, to compute the tag movement s = h∆x, ∆yi according to the phase variations, we investigate their relationships in the linear region and non-linear region, respectively. 4.3.1 Tag Movement in the Linear Region In the linear region, the phase variations detected from the two orthogonally deployed antennas are linear to the tag’s moving distances along the two orthogonal axes, respectively. E.g., as shown in Fig. 4, antenna Ax detects the phase variation of the tag movement along the X-axis, whereas antenna Ay detects the phase variations of the tag movement along the Y -axis. Let ∆θx and ∆θy be the phase variations from antenna Ax and Ay, respectively, so the tag movement s is computed as follows: ∆x ∆y = λ 4π ∆θx λ 4π ∆θy . (5) 4.3.2 Tag Movement in the Non-linear Region In the non-linear region, since the corresponding phase variations are not linear to the tag movement, we need to figure out their relationship according to the geometric property. Given the phase variations ∆θx and ∆θy respectively collected from the two orthogonally deployed antennas Ax and Ay, according to Eq. (4), we have: xlx∆x + ylx∆y = λ 4π ∆θx, xly∆x + yly∆y = λ 4π ∆θy, (6) where hxlx , ylx i and xly , yly
denote the normalized vector for the polar axis AP from the antenna Ax and Ay, respectively. Therefore, as long as the starting position of movement s , i.e, P, is known, the values of hxlx , ylx i and xly , yly
can be figured out. Then, by solving the linear equations in Eq. (6), we can directly compute [∆x, ∆y] T . 4.4 Model of Rigid Motion Decomposition As aforementioned, during the continuous moving process of the rigid body, the micro-movement can be defined by the rigid transformation including the rotation and translation. Meanwhile, the tag movement can be regarded as the particle movement only with the translation. Therefore, we investigate the relationship between the tag movement and the rigid transformation of the tagged object, i.e., translation, rotation and translation with rotation, respectively. 4.4.1 Translation The translation means a linear movement that every point of the device moves with the same displacement. Suppose a rigid body is attached with a tag array T, when the center of the rigid body translates from position Ps to position Pe, each tag Ti in the tag array has the same translation S = sx, sy T . Let [xi,s, yi,s] T and [xi,e, yi,e] T be the coordinates of tag Ti when the rigid body is at position Ps and Pe, respectively, then: xi,e yi,e = xi,s yi,s + S. (7) Fig. 7(a) shows an example of the translation when the rigid body is attached with a rectangle tag array. 4.4.2 Rotation The rotation means a circular movement that the device rotates around a rotation center. Suppose a rigid body is attached with a tag array T, when the rigid body rotates around a rotation center Pa by the angle of α, all the tags should have the same rotation angle. Specifically, let [xi,s, yi,s] T and [xi,e, yi,e] T be the coordinates of tag Ti when the rigid body starts rotation and ends rotation, respectively, let (xa, ya) be the coordinates of rotation center Pa, then: xi,e − xa yi,e − ya = R xi,s − xa yi,s − ya , (8) where R is a rotation matrix cos α − sin α sin α cos α , representing the counter-clockwise rotation of angle α. Fig. 7(b) shows an example of the rotation when the rigid body is attached with a rectangle tag array.��