正在加载图片...
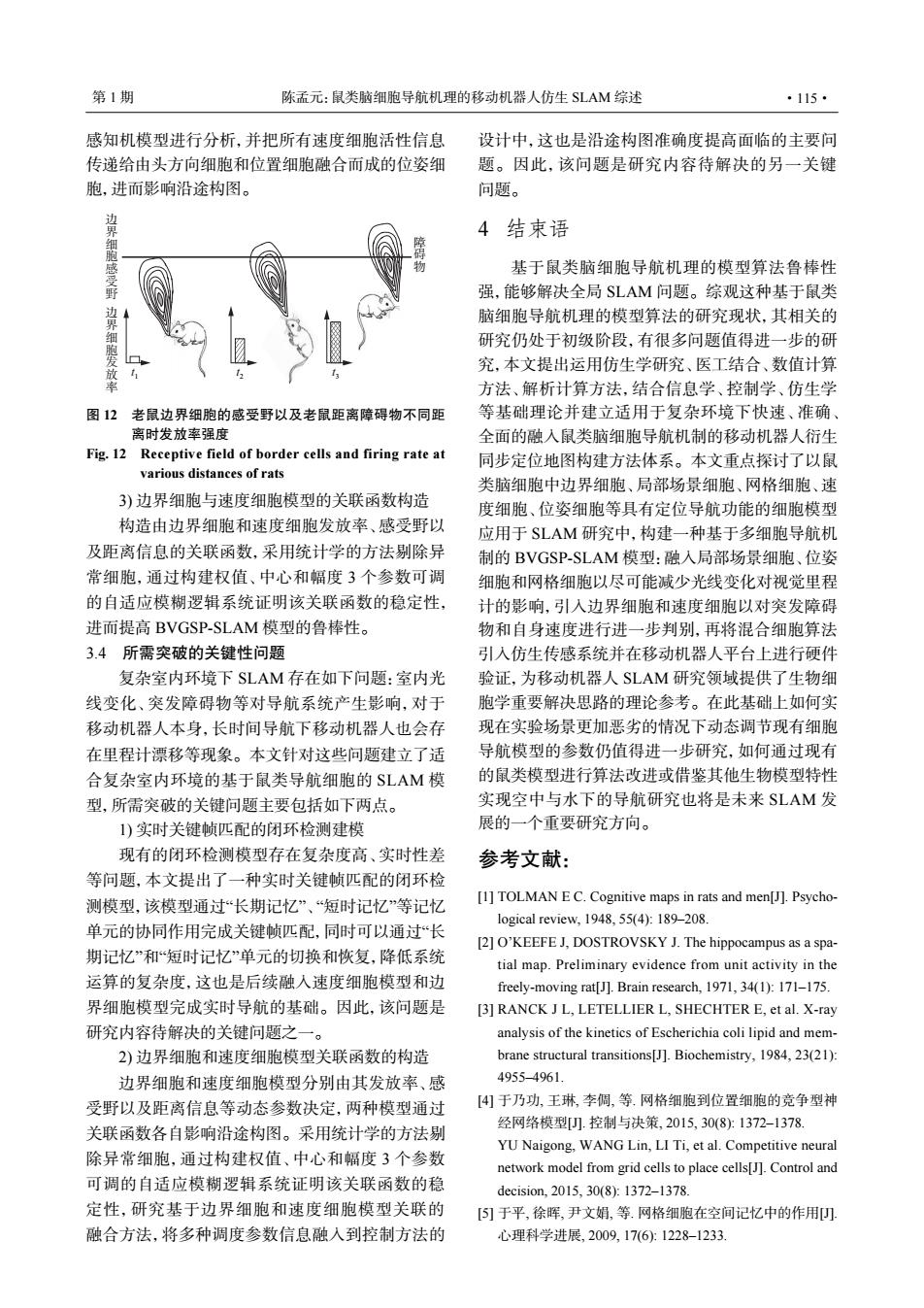
第1期 陈孟元:鼠类脑细胞导航机理的移动机器人仿生SLAM综述 ·115· 感知机模型进行分析,并把所有速度细胞活性信息 设计中,这也是沿途构图准确度提高面临的主要问 传递给由头方向细胞和位置细胞融合而成的位姿细 题。因此,该问题是研究内容待解决的另一关键 胞,进而影响沿途构图。 问题。 4结束语 基于鼠类脑细胞导航机理的模型算法鲁棒性 强,能够解决全局SLAM问题。综观这种基于鼠类 边 脑细胞导航机理的模型算法的研究现状,其相关的 研究仍处于初级阶段,有很多问题值得进一步的研 究,本文提出运用仿生学研究、医工结合、数值计算 方法、解析计算方法,结合信息学、控制学、仿生学 图12 老鼠边界细胞的感受野以及老鼠距离障碍物不同距 等基础理论并建立适用于复杂环境下快速、准确、 离时发放率强度 全面的融入鼠类脑细胞导航机制的移动机器人衍生 Fig.12 Receptive field of border cells and firing rate at 同步定位地图构建方法体系。本文重点探讨了以鼠 various distances of rats 类脑细胞中边界细胞、局部场景细胞、网格细胞、速 3)边界细胞与速度细胞模型的关联函数构造 度细胞、位姿细胞等具有定位导航功能的细胞模型 构造由边界细胞和速度细胞发放率、感受野以 应用于SLAM研究中,构建一种基于多细胞导航机 及距离信息的关联函数,采用统计学的方法别除异 制的BVGSP-SLAM模型:融入局部场景细胞、位姿 常细胞,通过构建权值、中心和幅度3个参数可调 细胞和网格细胞以尽可能减少光线变化对视觉里程 的自适应模糊逻辑系统证明该关联函数的稳定性, 计的影响,引入边界细胞和速度细胞以对突发障碍 进而提高BVGSP-SLAM模型的鲁棒性。 物和自身速度进行进一步判别,再将混合细胞算法 3.4所需突破的关键性问题 引入仿生传感系统并在移动机器人平台上进行硬件 复杂室内环境下SLAM存在如下问题:室内光 验证,为移动机器人SLAM研究领域提供了生物细 线变化、突发障碍物等对导航系统产生影响,对于 胞学重要解决思路的理论参考。在此基础上如何实 移动机器人本身,长时间导航下移动机器人也会存 现在实验场景更加恶劣的情况下动态调节现有细胞 在里程计漂移等现象。本文针对这些问题建立了适 导航模型的参数仍值得进一步研究,如何通过现有 合复杂室内环境的基于鼠类导航细胞的SLAM模 的鼠类模型进行算法改进或借鉴其他生物模型特性 型,所需突破的关键问题主要包括如下两点。 实现空中与水下的导航研究也将是未来SLAM发 1)实时关键帧匹配的闭环检测建模 展的一个重要研究方向。 现有的闭环检测模型存在复杂度高、实时性差 参考文献: 等问题,本文提出了一种实时关键帧匹配的闭环检 测模型,该模型通过“长期记忆”、“短时记忆”等记忆 [1]TOLMAN E C.Cognitive maps in rats and men[J].Psycho- logical review,1948,55(4):189-208 单元的协同作用完成关键帧匹配,同时可以通过“长 [2]O'KEEFE J,DOSTROVSKY J.The hippocampus as a spa- 期记忆”和短时记忆”单元的切换和恢复,降低系统 tial map.Preliminary evidence from unit activity in the 运算的复杂度,这也是后续融人速度细胞模型和边 freely-moving rat[J].Brain research,1971,34(1):171-175. 界细胞模型完成实时导航的基础。因此,该问题是 [3]RANCK JL,LETELLIER L,SHECHTER E,et al.X-ray 研究内容待解决的关键问题之一。 analysis of the kinetics of Escherichia coli lipid and mem- 2)边界细胞和速度细胞模型关联函数的构造 brane structural transitions[J].Biochemistry,1984,23(21): 边界细胞和速度细胞模型分别由其发放率、感 4955-4961. 受野以及距离信息等动态参数决定,两种模型通过 [4]于乃功,王琳,李倜,等.网格细胞到位置细胞的竞争型神 关联函数各自影响沿途构图。采用统计学的方法别 经网络模型[).控制与决策,2015,30(8):1372-1378. YU Naigong,WANG Lin,LI Ti,et al.Competitive neural 除异常细胞,通过构建权值、中心和幅度3个参数 network model from grid cells to place cells[J].Control and 可调的自适应模糊逻辑系统证明该关联函数的稳 decision,2015,30(8):1372-1378 定性,研究基于边界细胞和速度细胞模型关联的 [)]于平,徐晖,尹文娟,等.网格细胞在空间记忆中的作用) 融合方法,将多种调度参数信息融入到控制方法的 心理科学进展,2009,17(6):1228-1233感知机模型进行分析,并把所有速度细胞活性信息 传递给由头方向细胞和位置细胞融合而成的位姿细 胞,进而影响沿途构图。 䓥 ⩸ ㏲ 㘊 ࣽ ᩪ ⢳ 䓥 ⩸ ㏲ 㘊 ᙋ ः 䛺 t1 t2 t3 䯈 ⶹ ➕ 图 12 老鼠边界细胞的感受野以及老鼠距离障碍物不同距 离时发放率强度 Fig. 12 Receptive field of border cells and firing rate at various distances of rats 3) 边界细胞与速度细胞模型的关联函数构造 构造由边界细胞和速度细胞发放率、感受野以 及距离信息的关联函数,采用统计学的方法剔除异 常细胞,通过构建权值、中心和幅度 3 个参数可调 的自适应模糊逻辑系统证明该关联函数的稳定性, 进而提高 BVGSP-SLAM 模型的鲁棒性。 3.4 所需突破的关键性问题 复杂室内环境下 SLAM 存在如下问题:室内光 线变化、突发障碍物等对导航系统产生影响,对于 移动机器人本身,长时间导航下移动机器人也会存 在里程计漂移等现象。本文针对这些问题建立了适 合复杂室内环境的基于鼠类导航细胞的 SLAM 模 型,所需突破的关键问题主要包括如下两点。 1) 实时关键帧匹配的闭环检测建模 现有的闭环检测模型存在复杂度高、实时性差 等问题,本文提出了一种实时关键帧匹配的闭环检 测模型,该模型通过“长期记忆”、“短时记忆”等记忆 单元的协同作用完成关键帧匹配,同时可以通过“长 期记忆”和“短时记忆”单元的切换和恢复,降低系统 运算的复杂度,这也是后续融入速度细胞模型和边 界细胞模型完成实时导航的基础。因此,该问题是 研究内容待解决的关键问题之一。 2) 边界细胞和速度细胞模型关联函数的构造 边界细胞和速度细胞模型分别由其发放率、感 受野以及距离信息等动态参数决定,两种模型通过 关联函数各自影响沿途构图。采用统计学的方法剔 除异常细胞,通过构建权值、中心和幅度 3 个参数 可调的自适应模糊逻辑系统证明该关联函数的稳 定性,研究基于边界细胞和速度细胞模型关联的 融合方法,将多种调度参数信息融入到控制方法的 设计中,这也是沿途构图准确度提高面临的主要问 题。因此,该问题是研究内容待解决的另一关键 问题。 4 结束语 基于鼠类脑细胞导航机理的模型算法鲁棒性 强,能够解决全局 SLAM 问题。综观这种基于鼠类 脑细胞导航机理的模型算法的研究现状,其相关的 研究仍处于初级阶段,有很多问题值得进一步的研 究,本文提出运用仿生学研究、医工结合、数值计算 方法、解析计算方法,结合信息学、控制学、仿生学 等基础理论并建立适用于复杂环境下快速、准确、 全面的融入鼠类脑细胞导航机制的移动机器人衍生 同步定位地图构建方法体系。本文重点探讨了以鼠 类脑细胞中边界细胞、局部场景细胞、网格细胞、速 度细胞、位姿细胞等具有定位导航功能的细胞模型 应用于 SLAM 研究中,构建一种基于多细胞导航机 制的 BVGSP-SLAM 模型:融入局部场景细胞、位姿 细胞和网格细胞以尽可能减少光线变化对视觉里程 计的影响,引入边界细胞和速度细胞以对突发障碍 物和自身速度进行进一步判别,再将混合细胞算法 引入仿生传感系统并在移动机器人平台上进行硬件 验证,为移动机器人 SLAM 研究领域提供了生物细 胞学重要解决思路的理论参考。在此基础上如何实 现在实验场景更加恶劣的情况下动态调节现有细胞 导航模型的参数仍值得进一步研究,如何通过现有 的鼠类模型进行算法改进或借鉴其他生物模型特性 实现空中与水下的导航研究也将是未来 SLAM 发 展的一个重要研究方向。 参考文献: TOLMAN E C. Cognitive maps in rats and men[J]. Psychological review, 1948, 55(4): 189–208. [1] O’KEEFE J, DOSTROVSKY J. The hippocampus as a spatial map. Preliminary evidence from unit activity in the freely-moving rat[J]. Brain research, 1971, 34(1): 171–175. [2] RANCK J L, LETELLIER L, SHECHTER E, et al. X-ray analysis of the kinetics of Escherichia coli lipid and membrane structural transitions[J]. Biochemistry, 1984, 23(21): 4955–4961. [3] 于乃功, 王琳, 李倜, 等. 网格细胞到位置细胞的竞争型神 经网络模型[J]. 控制与决策, 2015, 30(8): 1372–1378. YU Naigong, WANG Lin, LI Ti, et al. Competitive neural network model from grid cells to place cells[J]. Control and decision, 2015, 30(8): 1372–1378. [4] 于平, 徐晖, 尹文娟, 等. 网格细胞在空间记忆中的作用[J]. 心理科学进展, 2009, 17(6): 1228–1233. [5] 第 1 期 陈孟元:鼠类脑细胞导航机理的移动机器人仿生 SLAM 综述 ·115·