正在加载图片...
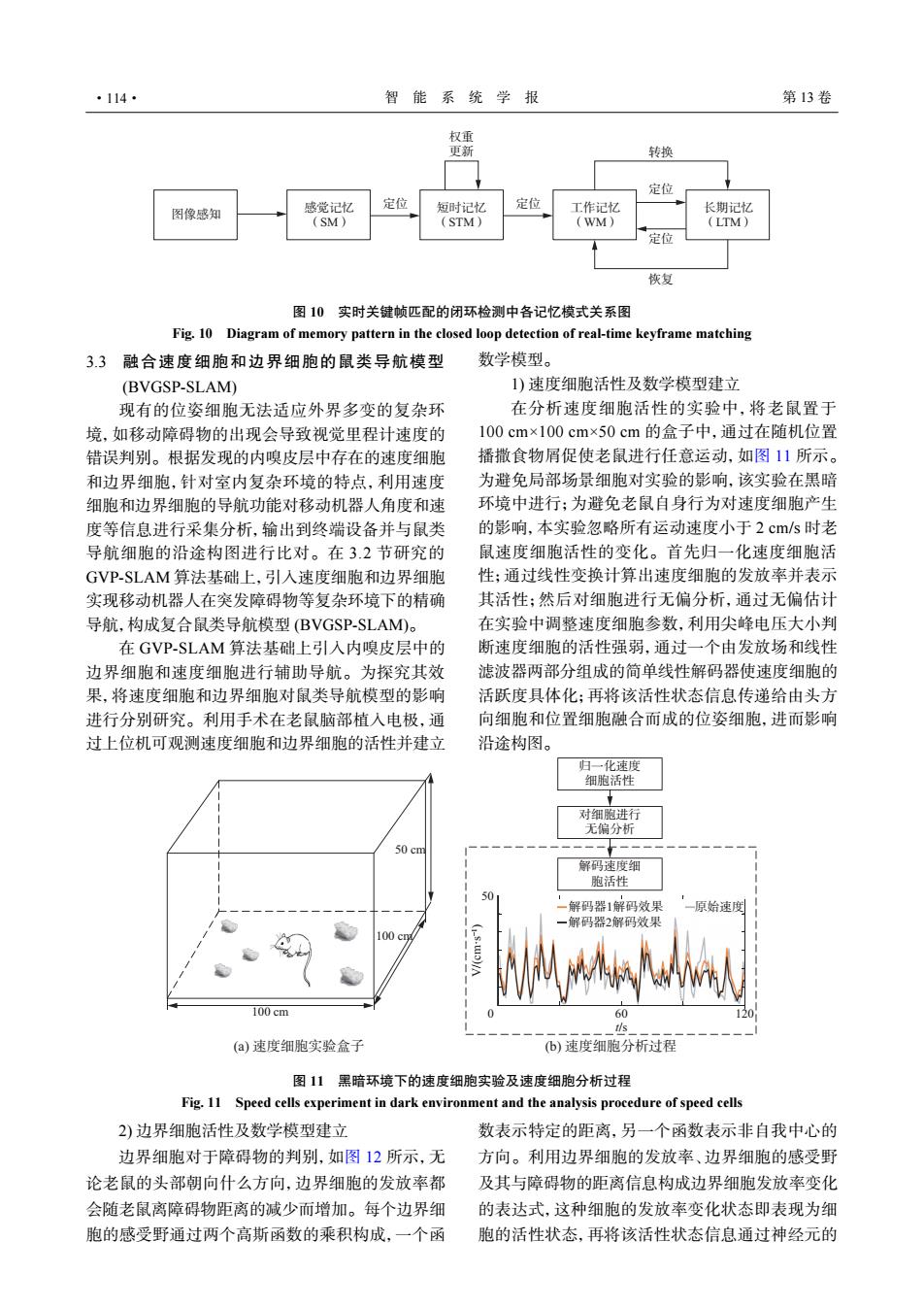
·114· 智能系统学报 第13卷 权重 更新 转换 定位 感觉记忆 定位 短时记忆 定位 图像感知 工作记忆 长期记忆 (SM) (STM) (WM) (LTM) 定位 恢复 图10实时关键帧匹配的闭环检测中各记忆模式关系图 Fig.10 Diagram of memory pattern in the closed loop detection of real-time keyframe matching 3.3融合速度细胞和边界细胞的鼠类导航模型 数学模型。 (BVGSP-SLAM) 1)速度细胞活性及数学模型建立 现有的位姿细胞无法适应外界多变的复杂环 在分析速度细胞活性的实验中,将老鼠置于 境,如移动障碍物的出现会导致视觉里程计速度的 100cm×100cm×50cm的盒子中,通过在随机位置 错误判别。根据发现的内嗅皮层中存在的速度细胞 播撒食物屑促使老鼠进行任意运动,如图11所示。 和边界细胞,针对室内复杂环境的特点,利用速度 为避免局部场景细胞对实验的影响,该实验在黑暗 细胞和边界细胞的导航功能对移动机器人角度和速 环境中进行;为避免老鼠自身行为对速度细胞产生 度等信息进行采集分析,输出到终端设备并与鼠类 的影响,本实验忽略所有运动速度小于2cm/s时老 导航细胞的沿途构图进行比对。在3.2节研究的 鼠速度细胞活性的变化。首先归一化速度细胞活 GVP-SLAM算法基础上,引入速度细胞和边界细胞 性;通过线性变换计算出速度细胞的发放率并表示 实现移动机器人在突发障碍物等复杂环境下的精确 其活性;然后对细胞进行无偏分析,通过无偏估计 导航,构成复合鼠类导航模型(BVGSP-.SLAM)。 在实验中调整速度细胞参数,利用尖峰电压大小判 在GVP-SLAM算法基础上引人内嗅皮层中的 断速度细胞的活性强弱,通过一个由发放场和线性 边界细胞和速度细胞进行辅助导航。为探究其效 滤波器两部分组成的简单线性解码器使速度细胞的 果,将速度细胞和边界细胞对鼠类导航模型的影响 活跃度具体化;再将该活性状态信息传递给由头方 进行分别研究。利用手术在老鼠脑部植入电极,通 向细胞和位置细胞融合而成的位姿细胞,进而影响 过上位机可观测速度细胞和边界细胞的活性并建立 沿途构图。 归一化速度 细胞活性 对细胞进行 无偏分析 50 cm 一一 解码速度细 胞活性 50 解码器1解码效果 一原始速度 一解码器2解码效果 100c * 100cm 60 t/s (a)速度细胞实验盒子 (b)速度细胞分析过程 图11黑暗环境下的速度细胞实验及速度细胞分析过程 Fig.11 Speed cells experiment in dark environment and the analysis procedure of speed cells 2)边界细胞活性及数学模型建立 数表示特定的距离.另一个函数表示非自我中心的 边界细胞对于障碍物的判别,如图12所示,无 方向。利用边界细胞的发放率、边界细胞的感受野 论老鼠的头部朝向什么方向,边界细胞的发放率都 及其与障碍物的距离信息构成边界细胞发放率变化 会随老鼠离障碍物距离的减少而增加。每个边界细 的表达式,这种细胞的发放率变化状态即表现为细 胞的感受野通过两个高斯函数的乘积构成,一个函 胞的活性状态,再将该活性状态信息通过神经元的3.3 融合速度细胞和边界细胞的鼠类导航模型 (BVGSP-SLAM) 现有的位姿细胞无法适应外界多变的复杂环 境,如移动障碍物的出现会导致视觉里程计速度的 错误判别。根据发现的内嗅皮层中存在的速度细胞 和边界细胞,针对室内复杂环境的特点,利用速度 细胞和边界细胞的导航功能对移动机器人角度和速 度等信息进行采集分析,输出到终端设备并与鼠类 导航细胞的沿途构图进行比对。在 3.2 节研究的 GVP-SLAM 算法基础上,引入速度细胞和边界细胞 实现移动机器人在突发障碍物等复杂环境下的精确 导航,构成复合鼠类导航模型 (BVGSP-SLAM)。 在 GVP-SLAM 算法基础上引入内嗅皮层中的 边界细胞和速度细胞进行辅助导航。为探究其效 果,将速度细胞和边界细胞对鼠类导航模型的影响 进行分别研究。利用手术在老鼠脑部植入电极,通 过上位机可观测速度细胞和边界细胞的活性并建立 数学模型。 1) 速度细胞活性及数学模型建立 在分析速度细胞活性的实验中,将老鼠置于 100 cm×100 cm×50 cm 的盒子中,通过在随机位置 播撒食物屑促使老鼠进行任意运动,如图 11 所示。 为避免局部场景细胞对实验的影响,该实验在黑暗 环境中进行;为避免老鼠自身行为对速度细胞产生 的影响,本实验忽略所有运动速度小于 2 cm/s 时老 鼠速度细胞活性的变化。首先归一化速度细胞活 性;通过线性变换计算出速度细胞的发放率并表示 其活性;然后对细胞进行无偏分析,通过无偏估计 在实验中调整速度细胞参数,利用尖峰电压大小判 断速度细胞的活性强弱,通过一个由发放场和线性 滤波器两部分组成的简单线性解码器使速度细胞的 活跃度具体化;再将该活性状态信息传递给由头方 向细胞和位置细胞融合而成的位姿细胞,进而影响 沿途构图。 2) 边界细胞活性及数学模型建立 边界细胞对于障碍物的判别,如图 12 所示,无 论老鼠的头部朝向什么方向,边界细胞的发放率都 会随老鼠离障碍物距离的减少而增加。每个边界细 胞的感受野通过两个高斯函数的乘积构成,一个函 数表示特定的距离,另一个函数表示非自我中心的 方向。利用边界细胞的发放率、边界细胞的感受野 及其与障碍物的距离信息构成边界细胞发放率变化 的表达式,这种细胞的发放率变化状态即表现为细 胞的活性状态,再将该活性状态信息通过神经元的 ҈䃜ᓲ 喋WM喌 䪫䃜ᓲ 喋LTM喌 ⴙᬢ䃜ᓲ 喋STM喌 ᙋ㻵䃜ᓲ 喋SM喌 పᙋⴑ ѹ ѹ ѹ ѹ 䒘ᢎ ᖎู ᱯ䛹 ᰠ 图 10 实时关键帧匹配的闭环检测中各记忆模式关系图 Fig. 10 Diagram of memory pattern in the closed loop detection of real-time keyframe matching V/(cm·s−1 ) 㼏ⴭஔ1㼏ⴭᩴ ࣋䕋Ꮢ 㼏ⴭஔ2㼏ⴭᩴ t/s ᑾ̬ࡂ䕋Ꮢ ㏲㘊≧ᕓ ᄥ㏲㘊䔇㵸 ᬌջܲ 㼏ⴭ䕋Ꮢ㏲ 㘊≧ᕓ 50 100 cm 0 60 120 100 cm 50 cm (a) 䕋Ꮢ㏲㘊侸⯾ၼ (b) 䕋Ꮢ㏲㘊ܲ䓳⼷ 图 11 黑暗环境下的速度细胞实验及速度细胞分析过程 Fig. 11 Speed cells experiment in dark environment and the analysis procedure of speed cells ·114· 智 能 系 统 学 报 第 13 卷