正在加载图片...
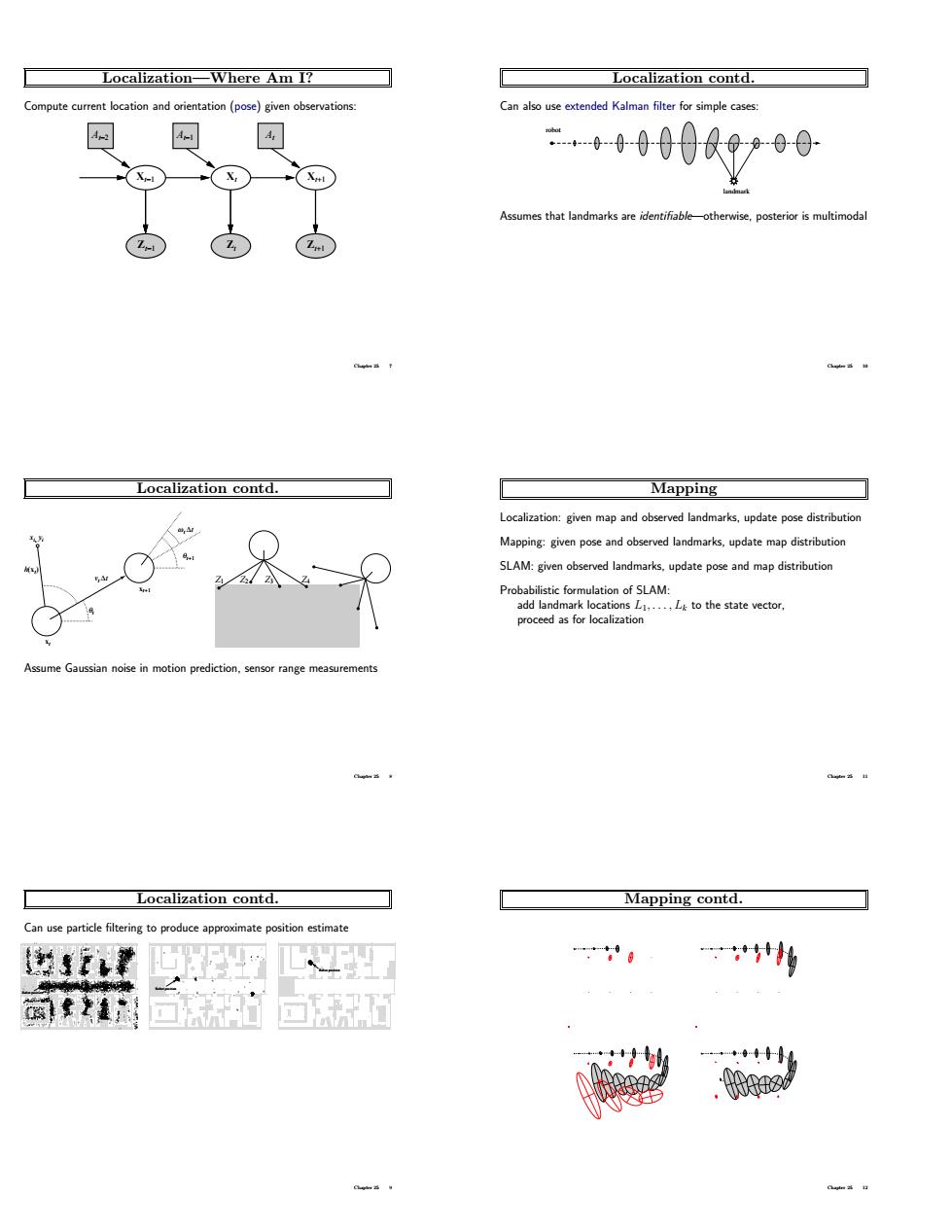
Localization-Where am I? Localization contd. Compute cu rrent location ando(ivbrations Canausextended Kalmanfilter or simple cases: -40009e0 Localization contd Mapping SLAM:given observed landmarks,update pose and map distribution Probabilistic formulation of SLAM- to the state vector Localization contd. Mapping contd. 57囊 回而 Localization—Where Am I? Compute current location and orientation (pose) given observations: Xt Xt+1 At−2 At−1 At Zt−1 Xt−1 Zt Zt+1 Chapter 25 7 Localization contd. xi, yi vt ∆t t ∆t t+1 xt+1 h(xt ) xt θt θ ω Z1 Z2 Z3 Z4 Assume Gaussian noise in motion prediction, sensor range measurements Chapter 25 8 Localization contd. Can use particle filtering to produce approximate position estimate Robot position Robot position Robot position Chapter 25 9 Localization contd. Can also use extended Kalman filter for simple cases: robot landmark Assumes that landmarks are identifiable—otherwise, posterior is multimodal Chapter 25 10 Mapping Localization: given map and observed landmarks, update pose distribution Mapping: given pose and observed landmarks, update map distribution SLAM: given observed landmarks, update pose and map distribution Probabilistic formulation of SLAM: add landmark locations L1, . . . , Lk to the state vector, proceed as for localization Chapter 25 11 Mapping contd. Chapter 25 12