正在加载图片...
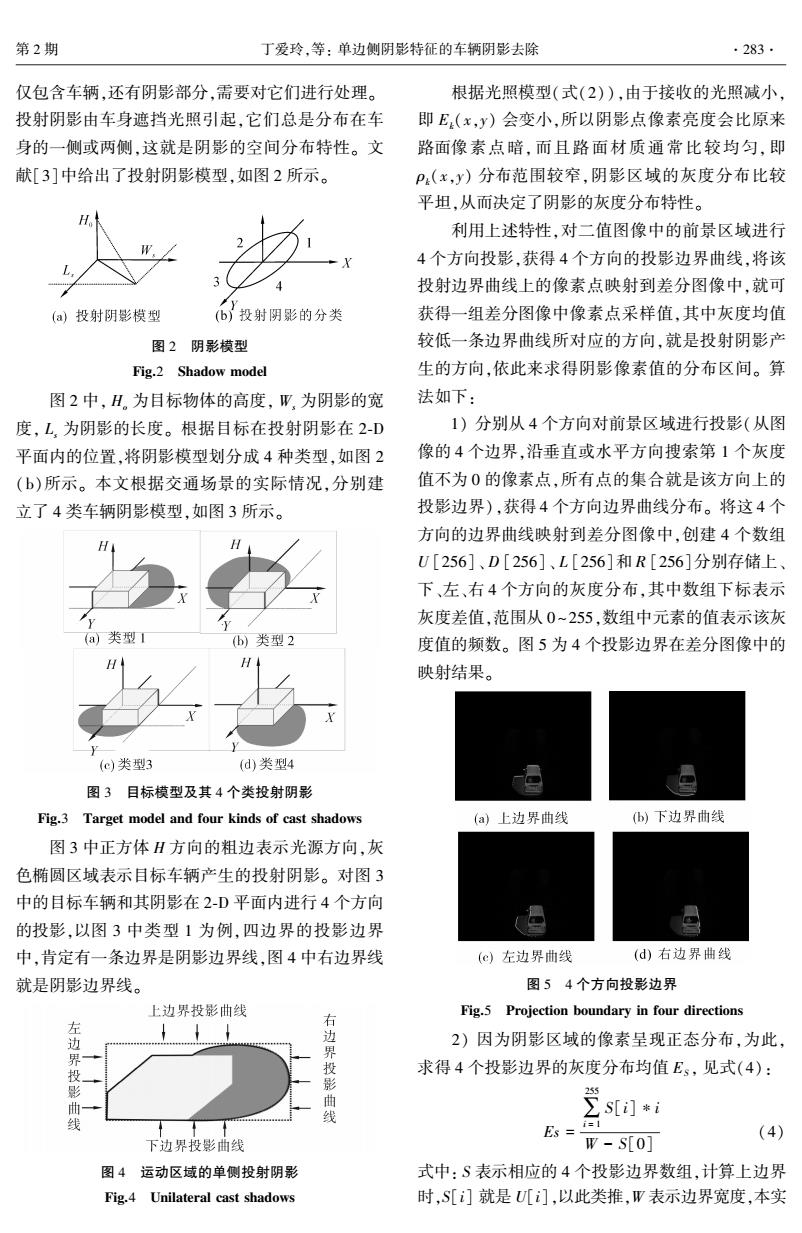
第2期 丁爱玲,等:单边侧阴影特征的车辆阴影去除 283· 仅包含车辆,还有阴影部分,需要对它们进行处理。 根据光照模型(式(2)),由于接收的光照减小, 投射阴影由车身遮挡光照引起,它们总是分布在车 即E:(x,y)会变小,所以阴影点像素亮度会比原来 身的一侧或两侧,这就是阴影的空间分布特性。文 路面像素点暗,而且路面材质通常比较均匀,即 献[3]中给出了投射阴影模型,如图2所示。 P(x,y)分布范围较窄,阴影区域的灰度分布比较 平坦,从而决定了阴影的灰度分布特性。 利用上述特性,对二值图像中的前景区域进行 4个方向投影,获得4个方向的投影边界曲线,将该 投射边界曲线上的像素点映射到差分图像中,就可 (a)投射阴影模型 (b)投射阴影的分类 获得一组差分图像中像素点采样值,其中灰度均值 图2阴影模型 较低一条边界曲线所对应的方向,就是投射阴影产 Fig.2 Shadow model 生的方向,依此来求得阴影像素值的分布区间。算 图2中,H。为目标物体的高度,W,为阴影的宽 法如下: 度,L,为阴影的长度。根据目标在投射阴影在2-D 1)分别从4个方向对前景区域进行投影(从图 平面内的位置,将阴影模型划分成4种类型,如图2 像的4个边界,沿垂直或水平方向搜索第1个灰度 (b)所示。本文根据交通场景的实际情况,分别建 值不为0的像素点,所有点的集合就是该方向上的 立了4类车辆阴影模型,如图3所示。 投影边界),获得4个方向边界曲线分布。将这4个 方向的边界曲线映射到差分图像中,创建4个数组 U[256]、D[256]、L[256]和R[256]分别存储上 下、左、右4个方向的灰度分布,其中数组下标表示 灰度差值,范围从0~255,数组中元素的值表示该灰 (a)类型 b)类型2 度值的频数。图5为4个投影边界在差分图像中的 H 映射结果。 (c)类型3 (d)类型4 图3目标模型及其4个类投射阴影 Fig.3 Target model and four kinds of cast shadows (a)上边界曲线 (b)下边界曲线 图3中正方体H方向的粗边表示光源方向,灰 色椭圆区域表示目标车辆产生的投射阴影。对图3 中的目标车辆和其阴影在2-D平面内进行4个方向 的投影,以图3中类型1为例,四边界的投影边界 中,肯定有一条边界是阴影边界线,图4中右边界线 (©)左边界曲线 (d)右边界曲线 就是阴影边界线。 图54个方向投影边界 上边界投影曲线 Fig.5 Projection boundary in four directions 必 右 边 2)因为阴影区域的像素呈现正态分布,为此, 界 投 影 一 投影曲线 求得4个投影边界的灰度分布均值E、,见式(4): 线 stil Es= (4) 下边界投影曲线 W-S[0] 图4运动区域的单侧投射阴影 式中:S表示相应的4个投影边界数组,计算上边界 Fig.4 Unilateral cast shadows 时,S[]就是[门,以此类推,W表示边界宽度,本实仅包含车辆,还有阴影部分,需要对它们进行处理。 投射阴影由车身遮挡光照引起,它们总是分布在车 身的一侧或两侧,这就是阴影的空间分布特性。 文 献[3]中给出了投射阴影模型,如图 2 所示。 图 2 阴影模型 Fig.2 Shadow model 图 2 中, Ho 为目标物体的高度, Ws 为阴影的宽 度, Ls 为阴影的长度。 根据目标在投射阴影在 2⁃D 平面内的位置,将阴影模型划分成 4 种类型,如图 2 (b)所示。 本文根据交通场景的实际情况,分别建 立了 4 类车辆阴影模型,如图 3 所示。 图 3 目标模型及其 4 个类投射阴影 Fig.3 Target model and four kinds of cast shadows 图 3 中正方体 H 方向的粗边表示光源方向,灰 色椭圆区域表示目标车辆产生的投射阴影。 对图 3 中的目标车辆和其阴影在 2⁃D 平面内进行 4 个方向 的投影,以图 3 中类型 1 为例,四边界的投影边界 中,肯定有一条边界是阴影边界线,图 4 中右边界线 就是阴影边界线。 图 4 运动区域的单侧投射阴影 Fig.4 Unilateral cast shadows 根据光照模型(式(2)),由于接收的光照减小, 即 Ek(x,y) 会变小,所以阴影点像素亮度会比原来 路面像素点暗, 而且路面材质通常比较均匀, 即 ρk(x,y) 分布范围较窄,阴影区域的灰度分布比较 平坦,从而决定了阴影的灰度分布特性。 利用上述特性,对二值图像中的前景区域进行 4 个方向投影,获得 4 个方向的投影边界曲线,将该 投射边界曲线上的像素点映射到差分图像中,就可 获得一组差分图像中像素点采样值,其中灰度均值 较低一条边界曲线所对应的方向,就是投射阴影产 生的方向,依此来求得阴影像素值的分布区间。 算 法如下: 1) 分别从 4 个方向对前景区域进行投影(从图 像的 4 个边界,沿垂直或水平方向搜索第 1 个灰度 值不为 0 的像素点,所有点的集合就是该方向上的 投影边界),获得 4 个方向边界曲线分布。 将这 4 个 方向的边界曲线映射到差分图像中,创建 4 个数组 U [256]、 D [256]、 L [256]和 R [256]分别存储上、 下、左、右 4 个方向的灰度分布,其中数组下标表示 灰度差值,范围从 0~255,数组中元素的值表示该灰 度值的频数。 图 5 为 4 个投影边界在差分图像中的 映射结果。 图 5 4 个方向投影边界 Fig.5 Projection boundary in four directions 2) 因为阴影区域的像素呈现正态分布,为此, 求得 4 个投影边界的灰度分布均值 ES , 见式(4): Es = ∑ 255 i = 1 S[i]∗i W - S[0] (4) 式中: S 表示相应的 4 个投影边界数组,计算上边界 时,S[i] 就是 U[i],以此类推,W 表示边界宽度,本实 第 2 期 丁爱玲,等: 单边侧阴影特征的车辆阴影去除 ·283·