正在加载图片...
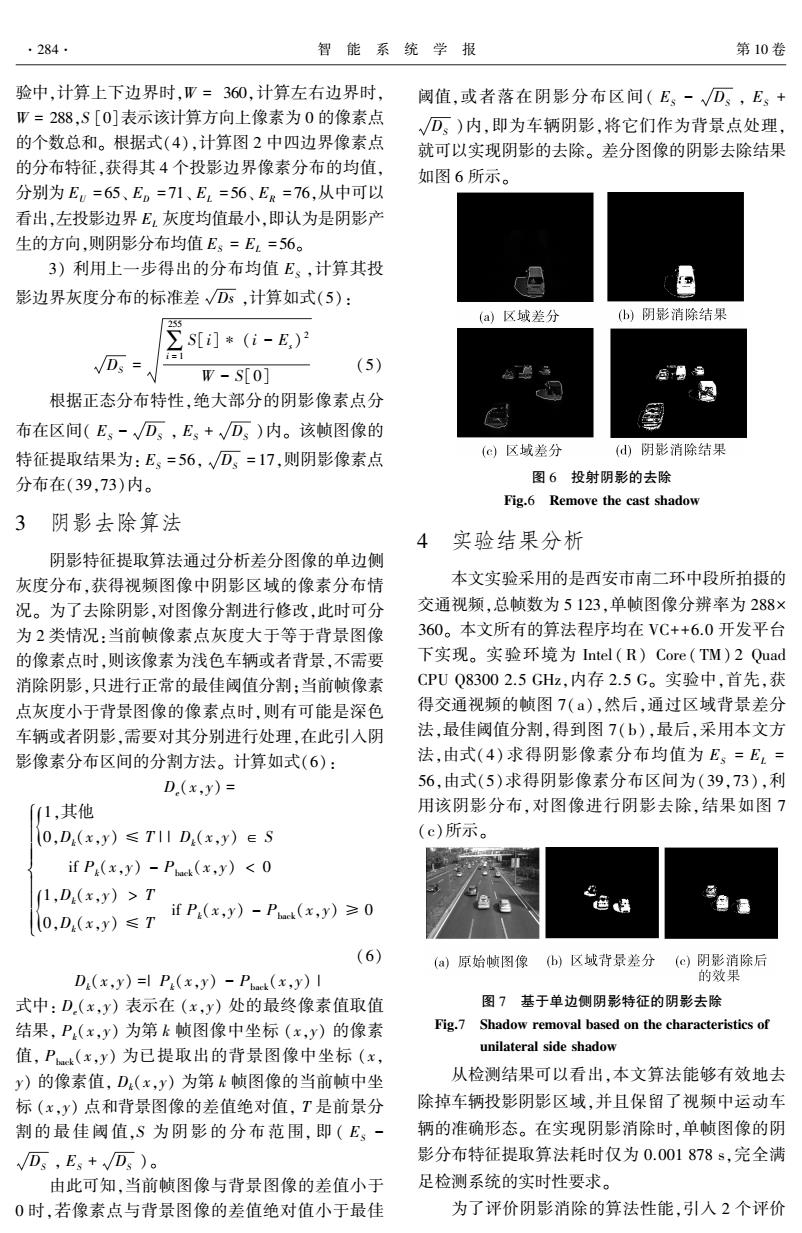
·284· 智能系统学报 第10卷 验中,计算上下边界时,W=360,计算左右边界时, 阈值,或者落在阴影分布区间(E,-√D、,Es+ W=288,S[0]表示该计算方向上像素为0的像素点 √D、)内,即为车辆阴影,将它们作为背景点处理, 的个数总和。根据式(4),计算图2中四边界像素点 就可以实现阴影的去除。差分图像的阴影去除结果 的分布特征,获得其4个投影边界像素分布的均值, 如图6所示。 分别为E,=65、E。=71、E,=56、ER=76,从中可以 看出,左投影边界E,灰度均值最小,即认为是阴影产 生的方向,则阴影分布均值Es=E,=56。 3)利用上一步得出的分布均值E、,计算其投 影边界灰度分布的标准差√Ds,计算如式(5): (a)区域差分 (b)阴影消除结果 ∑S[]*(i-E,)2 √Ds= W-S[0] (5) 根据正态分布特性,绝大部分的阴影像素点分 布在区间(Es-√D、,E、+√D)内。该帧图像的 特征提取结果为:E、=56,√D、=17,则阴影像素点 (c)区域差分 )阴影消除结果 分布在(39,73)内。 图6投射阴影的去除 Fig.6 Remove the cast shadow 3阴影去除算法 4实验结果分析 阴影特征提取算法通过分析差分图像的单边侧 灰度分布,获得视频图像中阴影区域的像素分布情 本文实验采用的是西安市南二环中段所拍摄的 况。为了去除阴影,对图像分割进行修改,此时可分 交通视频,总帧数为5123,单帧图像分辨率为288× 为2类情况:当前帧像素点灰度大于等于背景图像 360。本文所有的算法程序均在VC++6.0开发平台 的像素点时,则该像素为浅色车辆或者背景,不需要 下实现。实验环境为ntel(R)Core(TM)2Quad 消除阴影,只进行正常的最佳阈值分割:当前帧像素 CPUQ83002.5GHz,内存2.5G。实验中,首先,获 点灰度小于背景图像的像素点时,则有可能是深色 得交通视频的帧图7(a),然后,通过区域背景差分 车辆或者阴影,需要对其分别进行处理,在此引入阴 法,最佳阈值分割,得到图7(b),最后,采用本文方 影像素分布区间的分割方法。计算如式(6): 法,由式(4)求得阴影像素分布均值为E,=E,= D.(x,y)= 56,由式(5)求得阴影像素分布区间为(39,73),利 1,其他 用该阴影分布,对图像进行阴影去除,结果如图7 0,D(x,y)≤TIID(x,y)∈S (c)所示。 ifP(x,y)-P4(x,y)<0 1,D(x,y)>T ifP(x,y)-Pat(x,y)≥0 色群 0,D(x,y)≤T (6) (a)原始帧图像(b)区域背景差分 (c)阴影消除后 D(x,y)=I P(x,y)-Phck(x,y)I 的效果 式中:D.(x,y)表示在(x,y)处的最终像素值取值 图7基于单边侧阴影特征的阴影去除 结果,P(x,y)为第k帧图像中坐标(x,y)的像素 Fig.7 Shadow removal based on the characteristics of 值,P(x,y)为已提取出的背景图像中坐标(x, unilateral side shadow y)的像素值,D(x,y)为第k帧图像的当前帧中坐 从检测结果可以看出,本文算法能够有效地去 标(x,y)点和背景图像的差值绝对值,T是前景分 除掉车辆投影阴影区域,并且保留了视频中运动车 割的最佳阈值,S为阴影的分布范围,即(E、- 辆的准确形态。在实现阴影消除时,单帧图像的阴 √Ds,Es+√Ds)。 影分布特征提取算法耗时仅为0.001878s,完全满 由此可知,当前帧图像与背景图像的差值小于 足检测系统的实时性要求。 0时,若像素点与背景图像的差值绝对值小于最佳 为了评价阴影消除的算法性能,引入2个评价验中,计算上下边界时,W = 360,计算左右边界时, W = 288,S [0]表示该计算方向上像素为 0 的像素点 的个数总和。 根据式(4),计算图 2 中四边界像素点 的分布特征,获得其 4 个投影边界像素分布的均值, 分别为 EU = 65、 ED = 71、 EL = 56、 ER = 76,从中可以 看出,左投影边界 EL 灰度均值最小,即认为是阴影产 生的方向,则阴影分布均值 ES = EL = 56。 3) 利用上一步得出的分布均值 ES ,计算其投 影边界灰度分布的标准差 Ds ,计算如式(5): DS = ∑ 255 i = 1 S[i]∗ (i - Es) 2 W - S[0] (5) 根据正态分布特性,绝大部分的阴影像素点分 布在区间( ES - DS , ES + DS )内。 该帧图像的 特征提取结果为: ES = 56, DS = 17,则阴影像素点 分布在(39,73)内。 3 阴影去除算法 阴影特征提取算法通过分析差分图像的单边侧 灰度分布,获得视频图像中阴影区域的像素分布情 况。 为了去除阴影,对图像分割进行修改,此时可分 为 2 类情况:当前帧像素点灰度大于等于背景图像 的像素点时,则该像素为浅色车辆或者背景,不需要 消除阴影,只进行正常的最佳阈值分割;当前帧像素 点灰度小于背景图像的像素点时,则有可能是深色 车辆或者阴影,需要对其分别进行处理,在此引入阴 影像素分布区间的分割方法。 计算如式(6): De(x,y) = 1,其他 {0,Dk(x,y) ≤ T | | Dk(x,y) ∈ S if Pk(x,y) - Pback(x,y) < 0 1,Dk(x,y) > T 0,Dk(x,y) ≤ T { if Pk(x,y) - Pback(x,y) ≥ 0 ì î í ï ï ïï ï ï ïï (6) Dk(x,y) =| Pk(x,y) - Pback(x,y) | 式中: De(x,y) 表示在 (x,y) 处的最终像素值取值 结果, Pk(x,y) 为第 k 帧图像中坐标 (x,y) 的像素 值, Pback(x,y) 为已提取出的背景图像中坐标 (x, y) 的像素值, Dk(x,y) 为第 k 帧图像的当前帧中坐 标 (x,y) 点和背景图像的差值绝对值, T 是前景分 割的 最 佳 阈 值,S 为 阴 影 的 分 布 范 围, 即 ( ES - DS , ES + DS )。 由此可知,当前帧图像与背景图像的差值小于 0 时,若像素点与背景图像的差值绝对值小于最佳 阈值,或者落在阴影分布区间( ES - DS , ES + DS )内,即为车辆阴影,将它们作为背景点处理, 就可以实现阴影的去除。 差分图像的阴影去除结果 如图 6 所示。 图 6 投射阴影的去除 Fig.6 Remove the cast shadow 4 实验结果分析 本文实验采用的是西安市南二环中段所拍摄的 交通视频,总帧数为 5 123,单帧图像分辨率为 288× 360。 本文所有的算法程序均在 VC++6.0 开发平台 下实现。 实验环境为 Intel (R) Core ( TM) 2 Quad CPU Q8300 2.5 GHz,内存 2.5 G。 实验中,首先,获 得交通视频的帧图 7(a),然后,通过区域背景差分 法,最佳阈值分割,得到图 7( b),最后,采用本文方 法,由式(4) 求得阴影像素分布均值为 ES = EL = 56,由式(5)求得阴影像素分布区间为(39,73),利 用该阴影分布,对图像进行阴影去除,结果如图 7 (c)所示。 图 7 基于单边侧阴影特征的阴影去除 Fig.7 Shadow removal based on the characteristics of unilateral side shadow 从检测结果可以看出,本文算法能够有效地去 除掉车辆投影阴影区域,并且保留了视频中运动车 辆的准确形态。 在实现阴影消除时,单帧图像的阴 影分布特征提取算法耗时仅为 0.001 878 s,完全满 足检测系统的实时性要求。 为了评价阴影消除的算法性能,引入 2 个评价 ·284· 智 能 系 统 学 报 第 10 卷