正在加载图片...
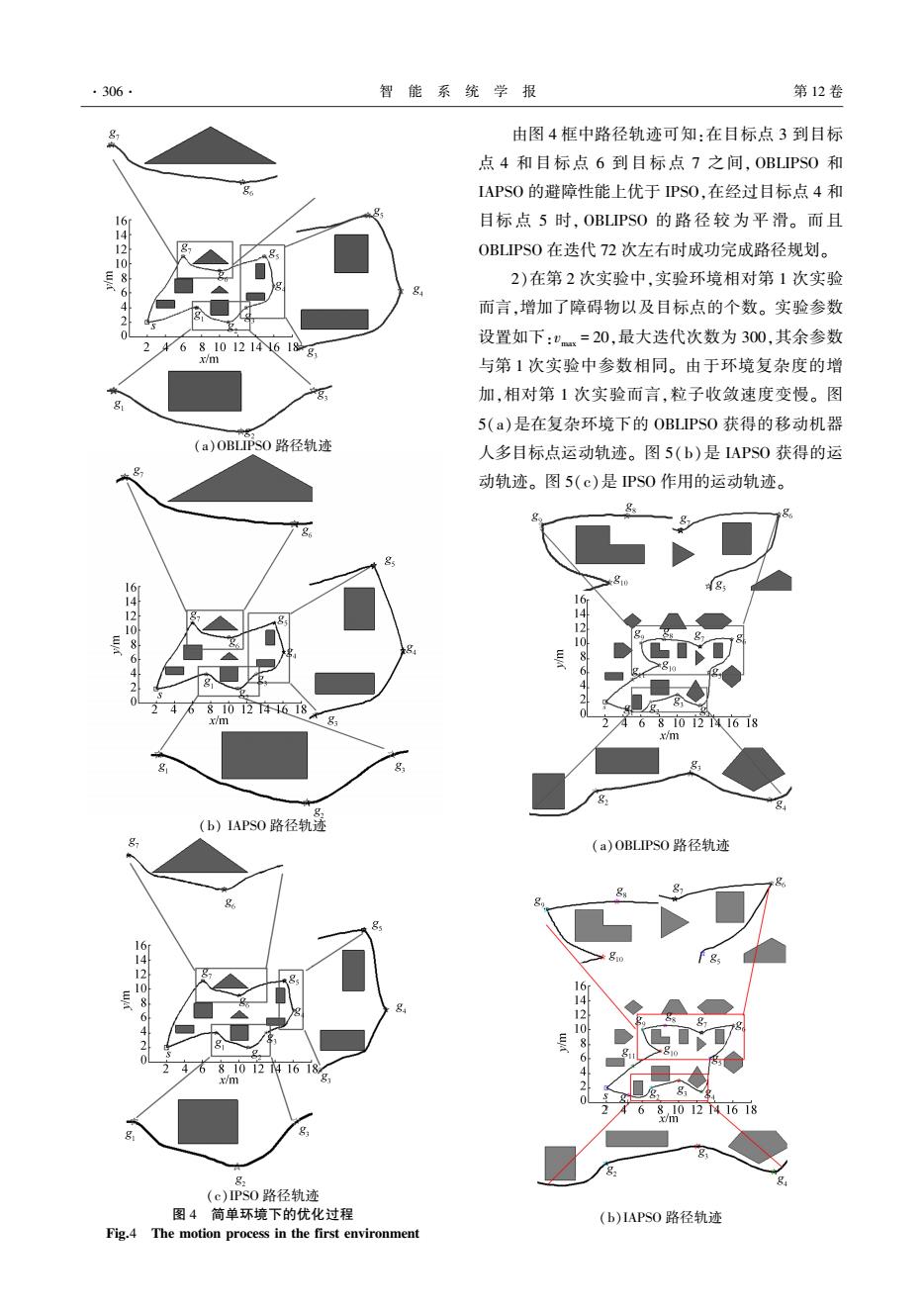
·306 智能系统学报 第12卷 由图4框中路径轨迹可知:在目标点3到目标 点4和目标点6到目标点7之间,OBLIPS0和 IAPS0的避障性能上优于PS0,在经过目标点4和 目标点5时,OBLIPSO的路径较为平滑。而且 642086420 OBLIPSO0在迭代72次左右时成功完成路径规划。 2)在第2次实验中,实验环境相对第1次实验 而言,增加了障碍物以及目标点的个数。实验参数 2468.101214618g 设置如下:”=20,最大迭代次数为300,其余参数 与第1次实验中参数相同。由于环境复杂度的增 加,相对第1次实验而言,粒子收敛速度变慢。图 5(a)是在复杂环境下的OBLIPS0获得的移动机器 (a)OBLIPSO路径轨迹 人多目标点运动轨迹。图5(b)是IAPS0获得的运 动轨迹。图5(c)是PS0作用的运动轨迹。 6420864 12 8.1012T41618 x/m 681012141618 x/m (b)IAPSO路径轨透 (a)OBLIPSO路径轨迹 6420 1 14 8642 日 右8101241618 6 4 x/m 6 /mo 12 4 16 18 82 (c)IPSO路径轨迹 图4简单环境下的优化过程 (b)IAPSO路径轨迹 Fig.4 The motion process in the first environment(a)OBLIPSO 路径轨迹 (b) IAPSO 路径轨迹 (c)IPSO 路径轨迹 图 4 简单环境下的优化过程 Fig.4 The motion process in the first environment 由图 4 框中路径轨迹可知:在目标点 3 到目标 点 4 和目标点 6 到目标点 7 之 间, OBLIPSO 和 IAPSO 的避障性能上优于 IPSO,在经过目标点 4 和 目标 点 5 时, OBLIPSO 的 路 径 较 为 平 滑。 而 且 OBLIPSO 在迭代 72 次左右时成功完成路径规划。 2)在第 2 次实验中,实验环境相对第 1 次实验 而言,增加了障碍物以及目标点的个数。 实验参数 设置如下:vmax = 20,最大迭代次数为 300,其余参数 与第 1 次实验中参数相同。 由于环境复杂度的增 加,相对第 1 次实验而言,粒子收敛速度变慢。 图 5(a)是在复杂环境下的 OBLIPSO 获得的移动机器 人多目标点运动轨迹。 图 5( b)是 IAPSO 获得的运 动轨迹。 图 5(c)是 IPSO 作用的运动轨迹。 (a)OBLIPSO 路径轨迹 (b)IAPSO 路径轨迹 ·306· 智 能 系 统 学 报 第 12 卷