正在加载图片...
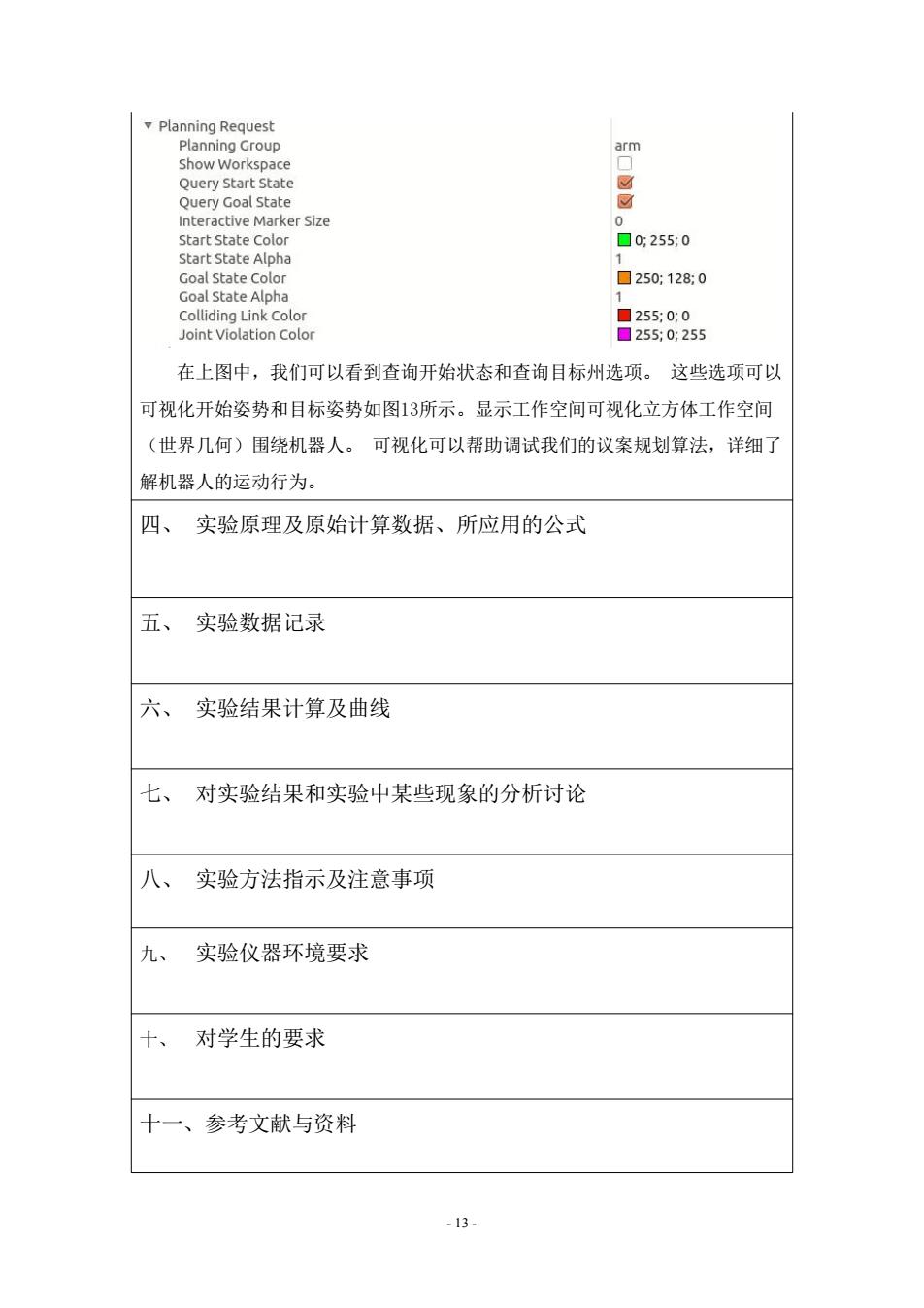
ⅴPlanning Request Planning Group arm Show Workspace Query Start State Query Goal State 豆 Interactive Marker Size 0 Start State Color ☐0:255;0 Start State Alpha Goal State Color ☐250;128:0 Goal State Alpha Colliding Link Color ☐255;0:0 Joint Violation Color ☐255:0:255 在上图中,我们可以看到查询开始状态和查询目标州选项。这些选项可以 可视化开始姿势和目标姿势如图13所示。显示工作空间可视化立方体工作空间 (世界几何)围绕机器人。可视化可以帮助调试我们的议案规划算法,详细了 解机器人的运动行为。 四、实验原理及原始计算数据、所应用的公式 五、实验数据记录 六、实验结果计算及曲线 七、对实验结果和实验中某些现象的分析讨论 八、 实验方法指示及注意事项 九、 实验仪器环境要求 十、 对学生的要求 十一、参考文献与资料 -13-- 13 - 在上图中,我们可以看到查询开始状态和查询目标州选项。 这些选项可以 可视化开始姿势和目标姿势如图13所示。显示工作空间可视化立方体工作空间 (世界几何)围绕机器人。 可视化可以帮助调试我们的议案规划算法,详细了 解机器人的运动行为。 四、 实验原理及原始计算数据、所应用的公式 五、 实验数据记录 六、 实验结果计算及曲线 七、 对实验结果和实验中某些现象的分析讨论 八、 实验方法指示及注意事项 九、 实验仪器环境要求 十、 对学生的要求 十一、参考文献与资料