正在加载图片...
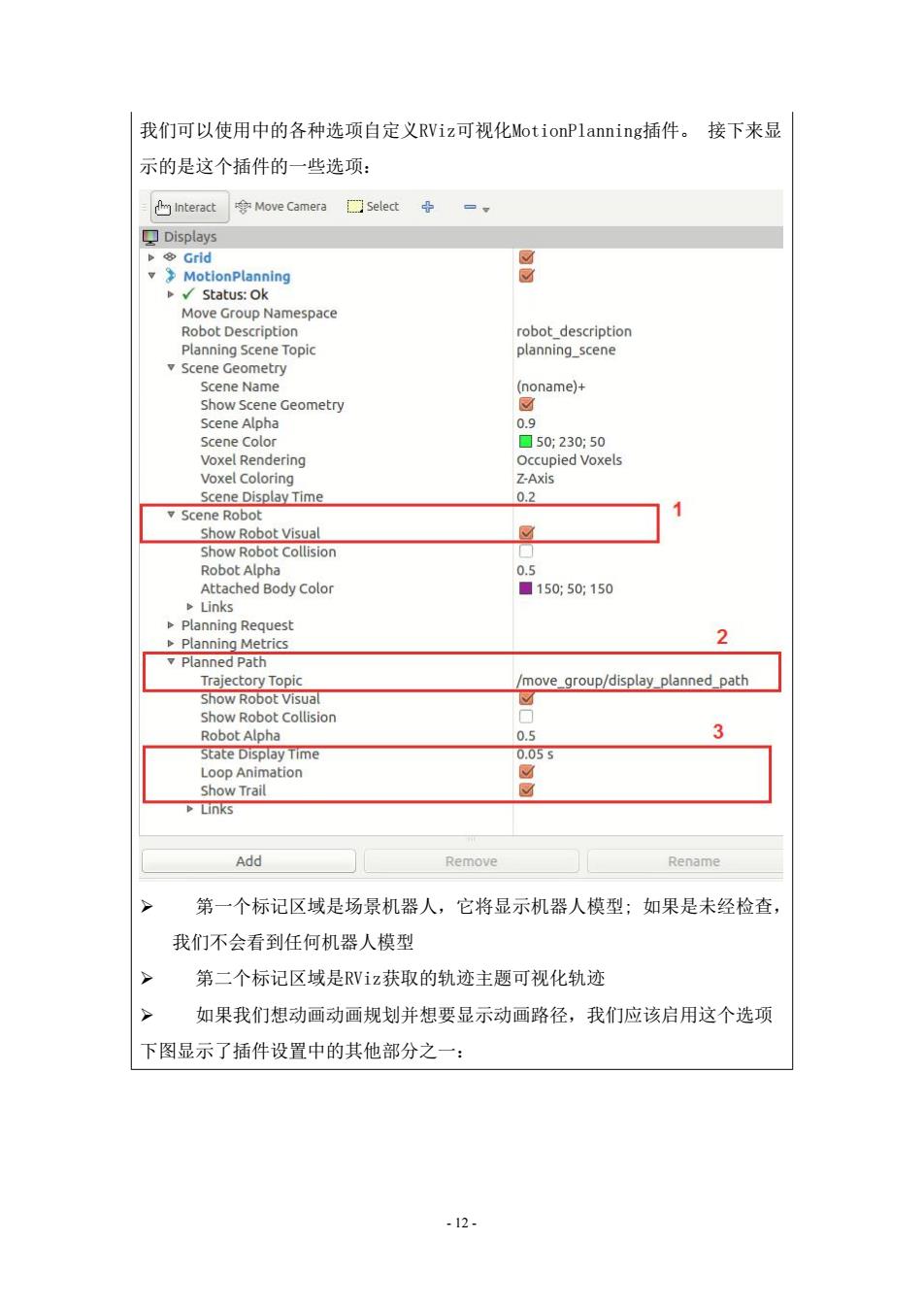
我们可以使用中的各种选项自定义RViz可视化MotionPlanning:插件。接下来显 示的是这个插件的一些选项: Interact Move Camera Select 里Displays b⑧Grid MotionPlanning Status:Ok Move Group Namespace Robot Description robot description Planning Scene Topic planning_scene vScene Geometry Scene Name (noname)+ Show Scene Geometry ☑ Scene Alpha 0.9 Scene Color ☐50;230;50 Voxel Rendering Occupied Voxels Voxel Coloring Z-Axis Scene Display Time 0.2 Scene Robot Show Robot Visual 区 Show Robot Collision ■ Robot Alpha 0 Attached Body Color ■150;50:150 Links Planning Request Planning Metrics 2 Planned Path Trajectory Topic /move group/display planned path Show Robot Visual Show Robot Collision Robot Alpha 0.5 3 State Display Time 0.05S Loop Animation Show Trail g Links Add Remove Rename 第一个标记区域是场景机器人,它将显示机器人模型;如果是未经检查, 我们不会看到任何机器人模型 第二个标记区域是RViz获取的轨迹主题可视化轨迹 如果我们想动画动画规划并想要显示动画路径,我们应该启用这个选项 下图显示了插件设置中的其他部分之一: -12-- 12 - 我们可以使用中的各种选项自定义RViz可视化MotionPlanning插件。 接下来显 示的是这个插件的一些选项: 第一个标记区域是场景机器人,它将显示机器人模型; 如果是未经检查, 我们不会看到任何机器人模型 第二个标记区域是RViz获取的轨迹主题可视化轨迹 如果我们想动画动画规划并想要显示动画路径,我们应该启用这个选项 下图显示了插件设置中的其他部分之一: