正在加载图片...
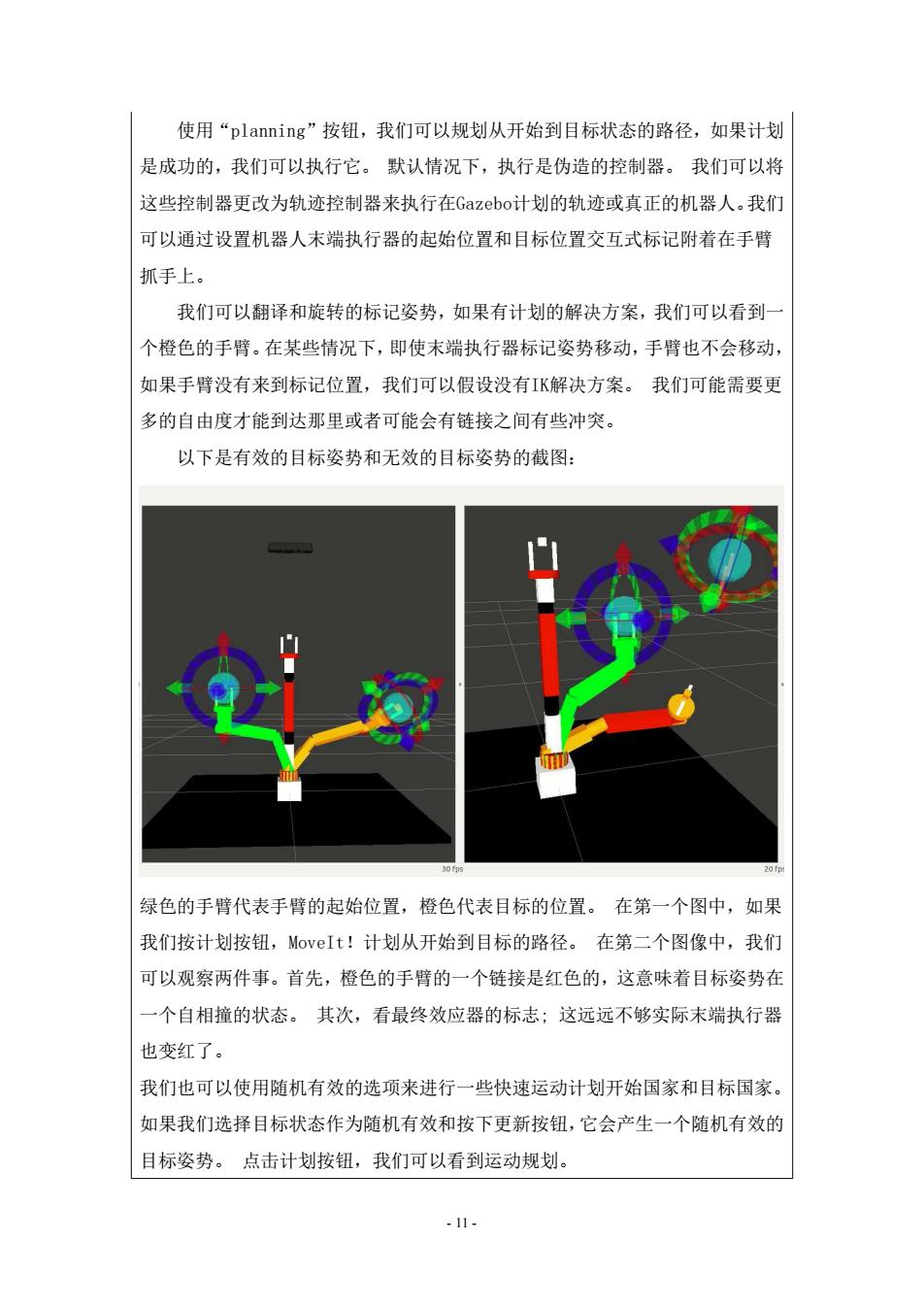
使用“planning”按钮,我们可以规划从开始到目标状态的路径,如果计划 是成功的,我们可以执行它。默认情况下,执行是伪造的控制器。我们可以将 这些控制器更改为轨迹控制器来执行在Gazeboi计划的轨迹或真正的机器人。我们 可以通过设置机器人末端执行器的起始位置和目标位置交互式标记附着在手臂 抓手上。 我们可以翻译和旋转的标记姿势,如果有计划的解决方案,我们可以看到一 个橙色的手臂。在某些情况下,即使末端执行器标记姿势移动,手臂也不会移动, 如果手臂没有来到标记位置,我们可以假设没有IK解决方案。我们可能需要更 多的自由度才能到达那里或者可能会有链接之间有些冲突。 以下是有效的目标姿势和无效的目标姿势的截图: 30 20 fp 绿色的手臂代表手臂的起始位置,橙色代表目标的位置。在第一个图中,如果 我们按计划按钮,MoveIt!计划从开始到目标的路径。在第二个图像中,我们 可以观察两件事。首先,橙色的手臂的一个链接是红色的,这意味着目标姿势在 一个自相撞的状态。其次,看最终效应器的标志:这远远不够实际末端执行器 也变红了。 我们也可以使用随机有效的选项来进行一些快速运动计划开始国家和目标国家。 如果我们选择目标状态作为随机有效和按下更新按钮,它会产生一个随机有效的 目标姿势。点击计划按钮,我们可以看到运动规划。 -11-- 11 - 使用“planning”按钮,我们可以规划从开始到目标状态的路径,如果计划 是成功的,我们可以执行它。 默认情况下,执行是伪造的控制器。 我们可以将 这些控制器更改为轨迹控制器来执行在Gazebo计划的轨迹或真正的机器人。我们 可以通过设置机器人末端执行器的起始位置和目标位置交互式标记附着在手臂 抓手上。 我们可以翻译和旋转的标记姿势,如果有计划的解决方案,我们可以看到一 个橙色的手臂。在某些情况下,即使末端执行器标记姿势移动,手臂也不会移动, 如果手臂没有来到标记位置,我们可以假设没有IK解决方案。 我们可能需要更 多的自由度才能到达那里或者可能会有链接之间有些冲突。 以下是有效的目标姿势和无效的目标姿势的截图: 绿色的手臂代表手臂的起始位置,橙色代表目标的位置。 在第一个图中,如果 我们按计划按钮,MoveIt!计划从开始到目标的路径。 在第二个图像中,我们 可以观察两件事。首先,橙色的手臂的一个链接是红色的,这意味着目标姿势在 一个自相撞的状态。 其次,看最终效应器的标志; 这远远不够实际末端执行器 也变红了。 我们也可以使用随机有效的选项来进行一些快速运动计划开始国家和目标国家。 如果我们选择目标状态作为随机有效和按下更新按钮,它会产生一个随机有效的 目标姿势。 点击计划按钮,我们可以看到运动规划