正在加载图片...
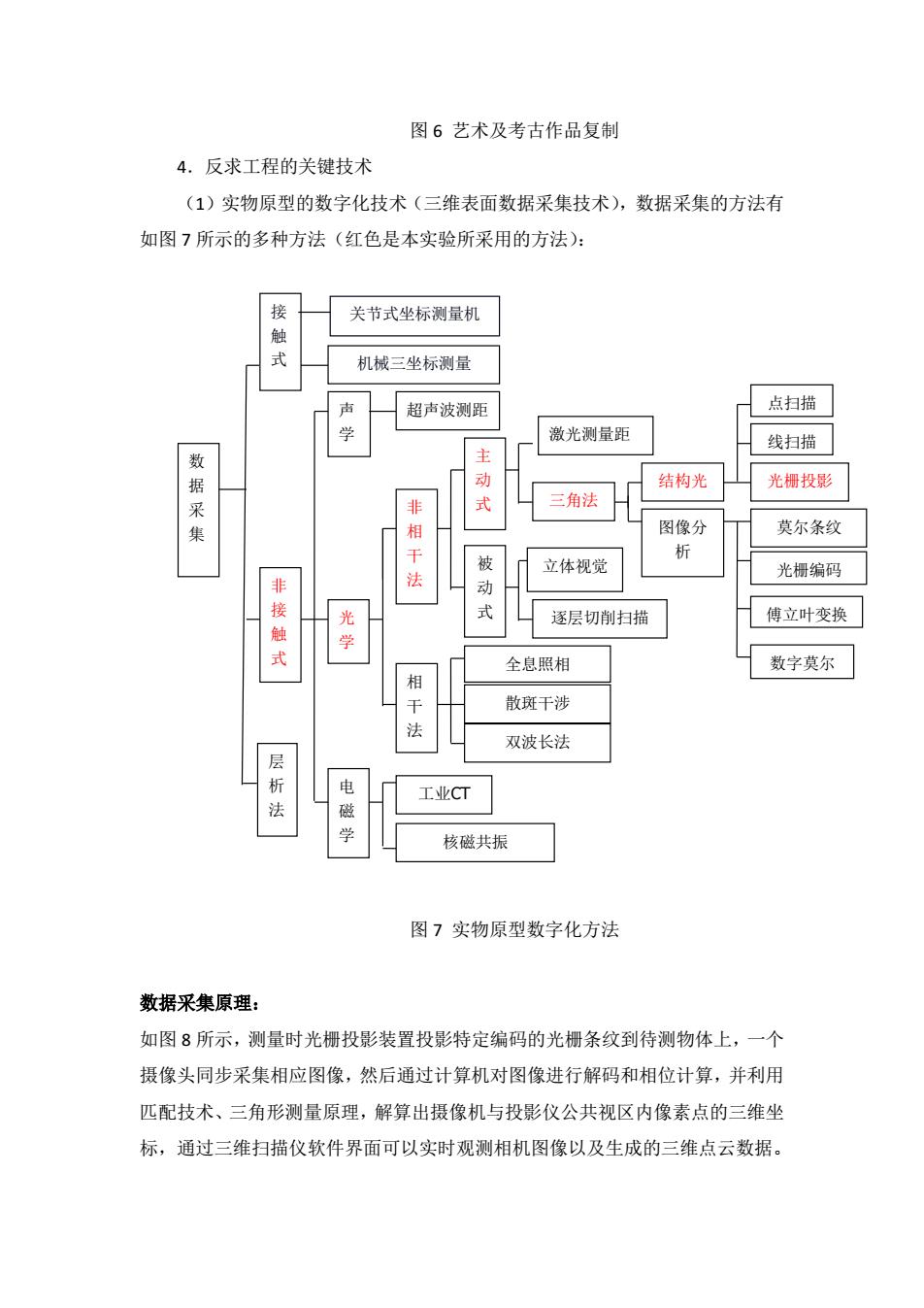
图6艺术及考古作品复制 4.反求工程的关键技术 (1)实物原型的数字化技术(三维表面数据采集技术),数据采集的方法有 如图7所示的多种方法(红色是本实验所采用的方法): 接 关节式坐标测量机 触 机械三坐标测量 超声波测距 点扫描 激光测量距 线扫描 主 数据采集 结构光 光栅投影 式 三角法 图像分 英尔条纹 立体视觉 光橱编码 逐层切削扫描 傅立叶变换 式 全息照相 数字莫尔 散斑干涉 双波长法 《 工业CT 法 核磁共振 图7实物原型数字化方法 数据采集原理: 如图8所示,测量时光栅投影装置投影特定编码的光栅条纹到待测物体上,一个 摄像头同步采集相应图像,然后通过计算机对图像进行解码和相位计算,并利用 匹配技术、三角形测量原理,解算出摄像机与投影仪公共视区内像素点的三维坐 标,通过三维扫描仪软件界面可以实时观测相机图像以及生成的三维点云数据, 图 6 艺术及考古作品复制 4.反求工程的关键技术 (1)实物原型的数字化技术(三维表面数据采集技术),数据采集的方法有 如图 7 所示的多种方法(红色是本实验所采用的方法): 图 7 实物原型数字化方法 数据采集原理: 如图 8 所示,测量时光栅投影装置投影特定编码的光栅条纹到待测物体上,一个 摄像头同步采集相应图像,然后通过计算机对图像进行解码和相位计算,并利用 匹配技术、三角形测量原理,解算出摄像机与投影仪公共视区内像素点的三维坐 标,通过三维扫描仪软件界面可以实时观测相机图像以及生成的三维点云数据。 数 据 采 集 接 触 式 非 接 触 式 光 学 非 相 干 法 相 干 法 主 动 式 激光测量距 三角法 结构光 光栅投影 图像分 析 线扫描 点扫描 莫尔条纹 被 光栅编码 动 式 立体视觉 逐层切削扫描 全息照相 散斑干涉 双波长法 电 磁 学 工业CT 核磁共振 声 学 超声波测距 机械三坐标测量 层 析 法 关节式坐标测量机 傅立叶变换 数字莫尔