正在加载图片...
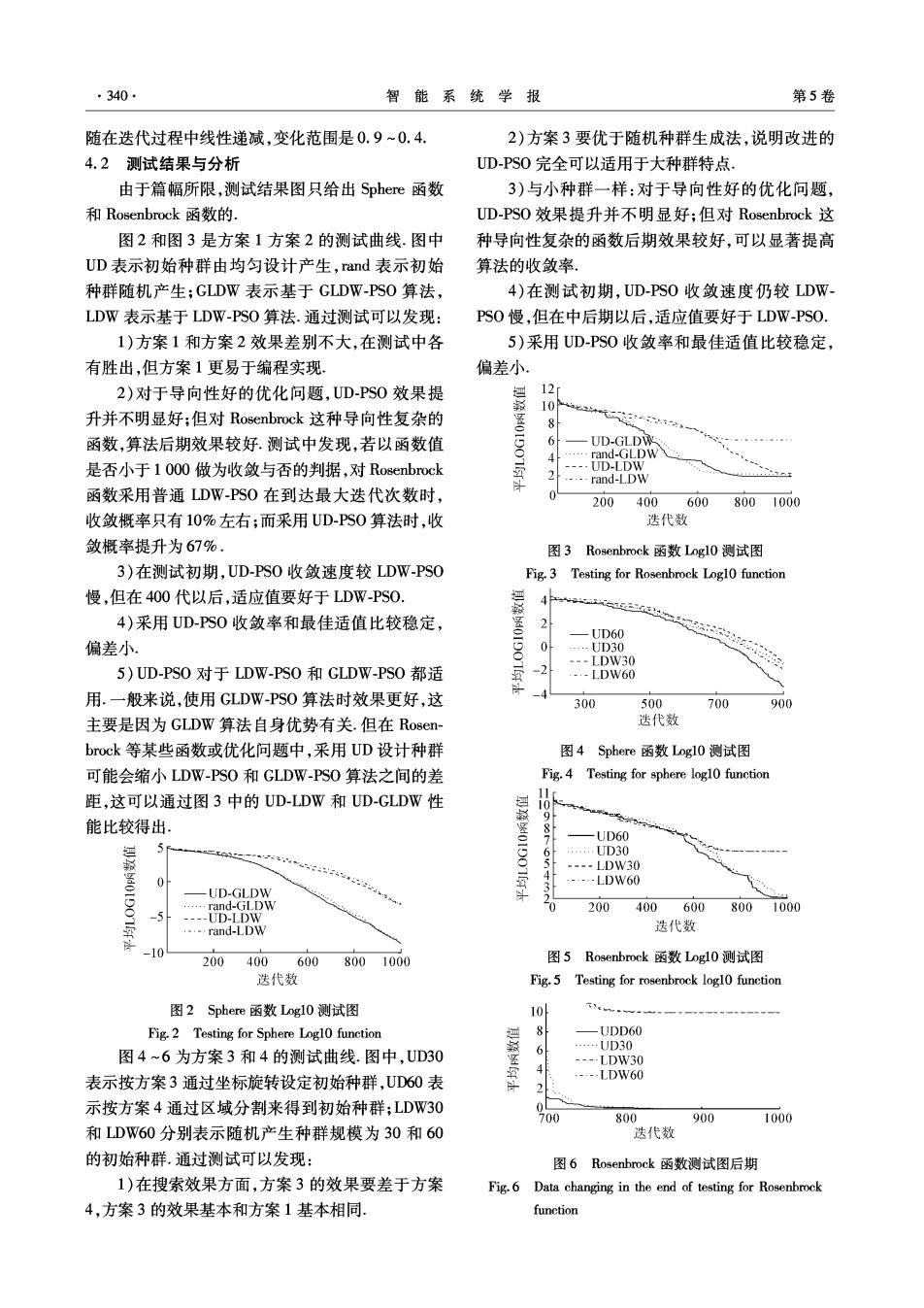
340 智能系统学报 第5卷 随在迭代过程中线性递减,变化范围是0.9~0.4. 2)方案3要优于随机种群生成法,说明改进的 4.2测试结果与分析 UD-PS0完全可以适用于大种群特点, 由于篇幅所限,测试结果图只给出Sphere函数 3)与小种群一样:对于导向性好的优化问题, 和Rosenbrock函数的, UD-PS0效果提升并不明显好;但对Rosenbrock这 图2和图3是方案1方案2的测试曲线.图中 种导向性复杂的函数后期效果较好,可以显著提高 UD表示初始种群由均匀设计产生,rand表示初始 算法的收敛率。 种群随机产生;GLDW表示基于GLDW-PSO算法, 4)在测试初期,UD-PS0收敛速度仍较LDW- LDW表示基于LDW-PSO算法.通过测试可以发现: PS0慢,但在中后期以后,适应值要好于LDW-PS0. 1)方案1和方案2效果差别不大,在测试中各 5)采用UD-PS0收敛率和最佳适值比较稳定, 有胜出,但方案1更易于编程实现 偏差小 2)对于导向性好的优化问题,UD-PS0效果提 12 10 升并不明显好;但对Rosenbrock这种导向性复杂的 8 函数,算法后期效果较好.测试中发现,若以函数值 UD-GLDW 是否小于1000做为收敛与否的判据,对Rosenbrock 挪Pw 2 ---rand-LDW 函数采用普通LDW-PS0在到达最大迭代次数时, 0 200 4006008001000 收敛概率只有10%左右;而采用UD-PS0算法时,收 迭代数 敛概率提升为67%. 图3 Rosenbrock函数Logl0测试图 3)在测试初期,UD-PS0收敛速度较LDW-PSO Fig.3 Testing for Rosenbrock Logl0 function 慢,但在400代以后,适应值要好于LDW-PS0, 泗 4 4)采用UD-PS0收敛率和最佳适值比较稳定, 2 -UD60 偏差小 0 -UD30 -=-LDW30 5)UD-PS0对于LDW-PS0和GLDW-PS0都适 -2 -.-LDW60 用.一般来说,使用GLDW-PS0算法时效果更好,这 300 500 700 900 主要是因为GLDW算法自身优势有关.但在Rosen- 迭代数 brock等某些函数或优化问题中,采用UD设计种群 图4 Sphere函数Logl0测试图 可能会缩小LDW-PSO和GLDW-PS0算法之间的差 Fig.4 Testing for sphere logl0 function 距,这可以通过图3中的UD-LDW和UD-GLDW性 11 能比较得出. -UD60 妇 …UD30 ---.LDW30 0 4 ---LDW60 -UD-GLDW .....rand-GLDW 0 200 400600 8001000 ----UD-IDW …rand-LDW 迭代数 2004006008001000 图5 Rosenbrock函数Logl0测试图 迭代数 Fig.5 Testing for rosenbrock log10 function 图2 Sphere函数Logl0测试图 101 . Fig.2 Testing for Sphere Logl0 function 8 -UDD60 …UD30 图4~6为方案3和4的测试曲线.图中,UD30 6 ---LDW30 表示按方案3通过坐标旋转设定初始种群,UD60表 .-.-LDW60 2 示按方案4通过区域分割来得到初始种群;LDW30 00 700 800 900 1000 和LDW60分别表示随机产生种群规模为30和60 迭代数 的初始种群.通过测试可以发现: 图6 Rosenbrock函数测试图后期 1)在搜索效果方面,方案3的效果要差于方案 Fig.6 Data changing in the end of testing for Rosenbrock 4,方案3的效果基本和方案1基本相同 function