正在加载图片...
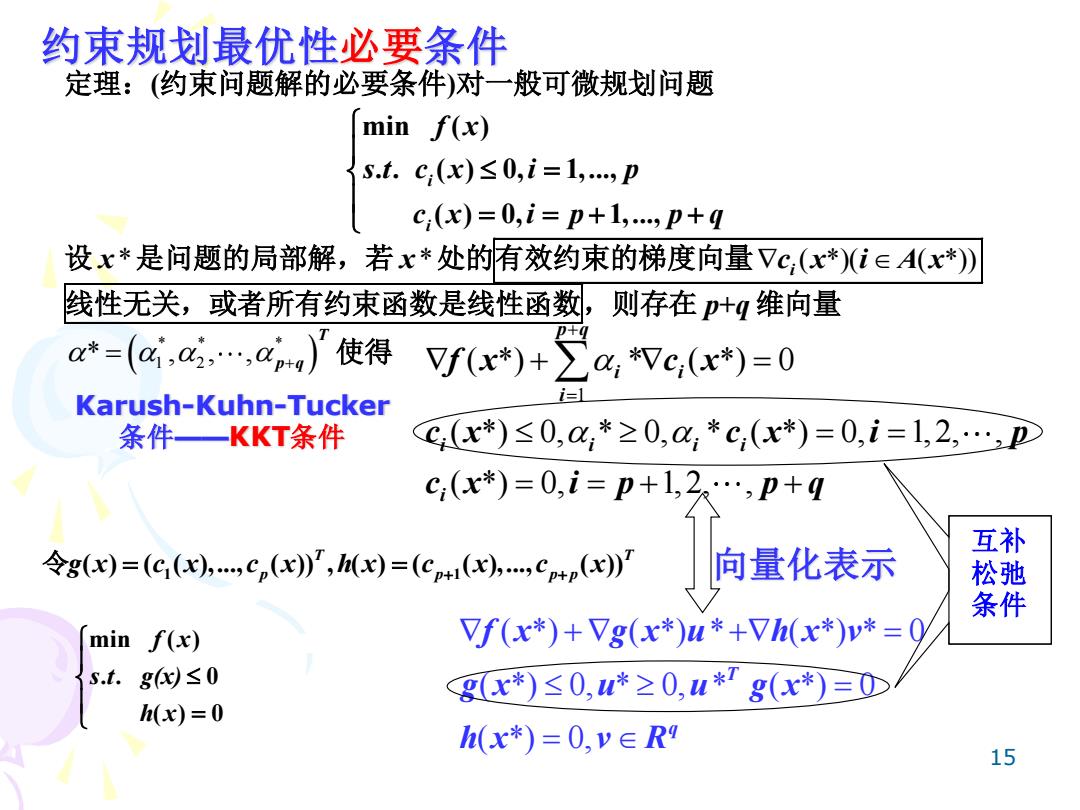
约束规划最优性必要条件 定理:(约束问题解的必要条件)对一般可微规划问题 min f(x) s.t.c,(x)≤0,i=1,,p c,(x)=0,i=p+1,,p+q 设x*是问题的局部解,若x*处的有效约束的梯度向量Vc,(x*)i∈A(x*) 线性无关,或者所有约束函数是线性函数,则存在p叶q维向量 *=(a,a,…,apg使得 f*+2a,vc,()=0 Karush-Kuhn-Tucker i= 条件—KKT条件 C(x*)≤0,a*≥0,0x,*c,(x*)=0,i=1,2,…2D cce)-Bi-plp 令g(e)=(G(x,C,(x》,(x)=(Cp4(x,,cpHn() 量化表示 互补 松弛 条件 min f(x) Vf(x*)+vg(x*)u*+h(x*)v*= s.t. g6x≤0 gx*)≤0,*≥0,w*rg(x*)=0 h(x)=0 h(x*)=0,y∈R 1515 定理:(约束问题解的必要条件)对一般可微规划问题 min ( ) . . ( ) 0, 1,..., ( ) 0, 1,..., i i f x s t c x i p c x i p p q = = = + + 设 x* 是问题的局部解,若 x* 处的有效约束的梯度向量 ( *)( ( *)) i c x i A x 线性无关,或者所有约束函数是线性函数,则存在 p+q 维向量 ( ) * * * 1 2 * , , , = + T p q 使得 1 1 ( ) ( ( ),..., ( )) , ( ) ( ( ),..., ( )) T T p p p p g x c x c x h x c x c x 令 = = + + min ( ) . . 0 ( ) 0 f x s t g(x) h x = 向量化表示 约束规划最优性必要条件 1 ( *) * ( *) 0 ( *) 0, * 0, * ( *) 0, 1,2, , ( *) 0, 1,2, , p q i i i i i i i i f x c x c x c x i p c x i p p q + = + = = = = = + + ( *) ( *) * ( *) * 0 ( *) 0, * 0, * ( *) 0 ( *) 0, + + = = = T q f x g x u h x v g x u u g x h x v R Karush-Kuhn-Tucker 条件——KKT条件 互补 松弛 条件