正在加载图片...
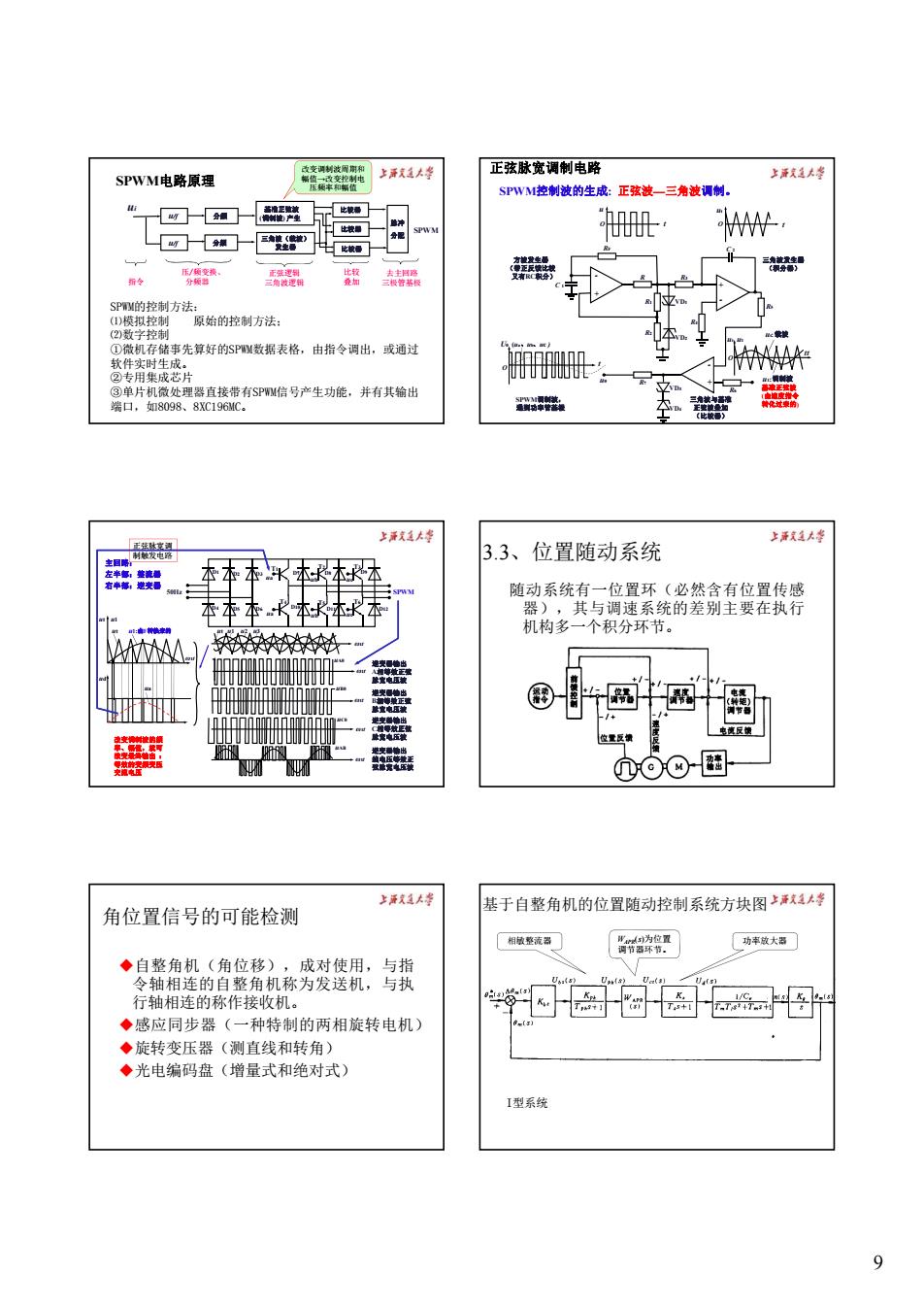
支变调制波周期和 上爵成道人华 正弦脉宽调制电路 SPWM电路原理 上评良总大当 SPVM控制波的生成:正弦波一三角波调制。 比较 比较 分配 t +, 去主屑路 出 路 三角被迎用 三管基 SPWM的控制方法: (1)模拟控制 原始的控制方法: (2)数字控制 ①微机存储事先算好的SPW数据表格,由指令调出,或通过 软件实时生成。 米 ②专用集成芯片 ③单片机微处理器直接带有SPWM信号产生功能,并有其输出 端口,如8098、8XC196MC。 整 化过的 比品 上承文总大坐 上活文丝大坐 主回略: 发电露 3.3、位置随动系统 左半忽:整液馨 本本本 随动系统有一位置环(必然含有位置传感 器),其与调速系统的差别主要在执行 机构多一个积分环节。 位量反情 ①⊙⊙閻 上证克生大孝 角位置信号的可能检测 基于自整角机的位置随动控制系统方块图孩丝峰 相敏整流器 含牌 「功率放大器 ◆自整角机(角位移),成对使用,与指 令轴相连的自整角机称为发送机,与执 行轴相连的称作接收机。 ◆感应同步器(一种特制的两相旋转电机) ◆旋转变压器(测直线和转角) ◆光电编码盘(增量式和绝对式) I型系统 99 SPWM电路原理 去主回路 三极管基极 u/f 分频 u/f 分频 基准正弦波 (调制波) 产生 三角波(载波) 发生器 比较器 SPWM 比较 叠加 ui 压/频变换、 分频器 正弦逻辑 指令 三角波逻辑 比较器 比较器 脉冲 分配 改变调制波周期和 幅值→改变控制电 压频率和幅值 SPWM的控制方法: ⑴模拟控制 原始的控制方法; ⑵数字控制 ①微机存储事先算好的SPWM数据表格,由指令调出,或通过 软件实时生成。 ②专用集成芯片 ③单片机微处理器直接带有SPWM信号产生功能,并有其输出 端口,如8098、8XC196MC。 SPWM控制波的生成: 正弦波—三角波调制。 方波发生器 (带正反馈比较 又有RC积分) 三角波发生器 (积分器) u ut O t O t RF R R3 C 1 C 2 - + 正弦脉宽调制电路 三角波与基准 正弦波叠加 (比较器) SPWM调制波, 通到功率管基极 基准正弦波 (由速度指令 转化过来的) VD1 调制波 载波 u1: ut u1 u0 O t R1 R2 R4 R5 R6 R7 VD2 VD3 VD4 U0 (ua、ub、 uc ) t O - - + + t ut: 50Hz SPWM D1 D2 D3 D4 D5 D6 D7 D8 D9 D10 D11 D12 T1 T2 T3 T4 T5 T6 ua ua ub ub uc uc ut u1 u2 u3 ut u1 ω1t ut u1:由F转换来的 主回路: 左半部:整流器 右半部:逆变器 正弦脉宽调 制触发电路 uAB ud ua ω1t ω1t ω1t ω1t ω1t uA0 uB0 uC0 逆变器输出 A相等效正弦 脉宽电压波 逆变器输出 B相等效正弦 脉宽电压波 逆变器输出 C相等效正弦 脉宽电压波 逆变器输出 线电压等效正 弦脉宽电压波 改变调制波的频 率、幅值,就可 改变最终输出 : 等效的变频变压 交流电压 3.3、位置随动系统 随动系统有一位置环(必然含有位置传感 器),其与调速系统的差别主要在执行 机构多一个积分环节。 角位置信号的可能检测 自整角机(角位移),成对使用,与指 令轴相连的自整角机称为发送机,与执 行轴相连的称作接收机。 感应同步器(一种特制的两相旋转电机) 旋转变压器(测直线和转角) 光电编码盘(增量式和绝对式) 基于自整角机的位置随动控制系统方块图 WAPR(s)为位置 调节器环节。 相敏整流器 功率放大器 I型系统