正在加载图片...
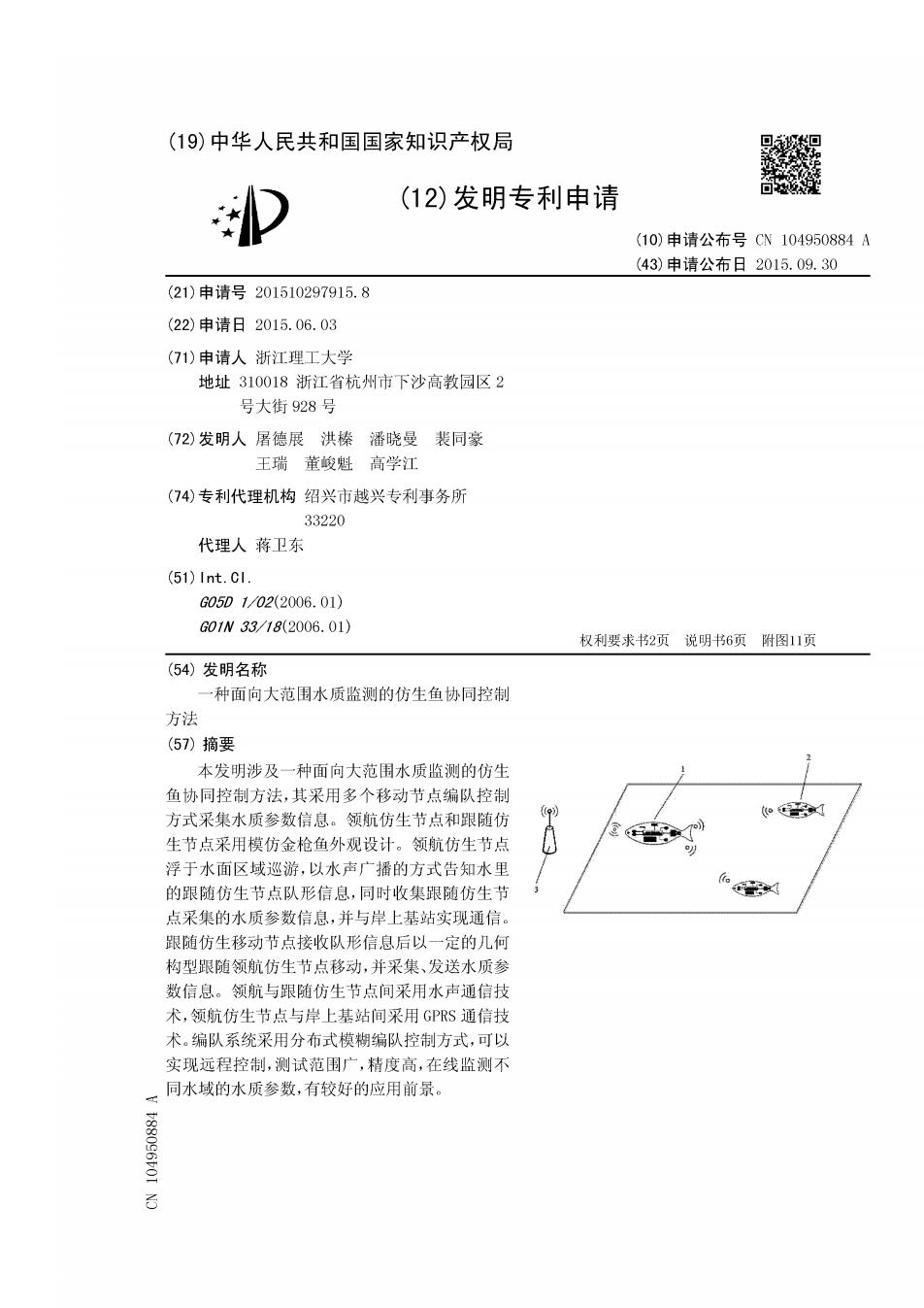
(19)中华人民共和国国家知识产权局 (12)发明专利申请 可 (10)申请公布号CN104950884A (43)申请公布日2015.09.30 (21)申请号201510297915.8 (22)申请日2015.06.03 (71)申请人浙江理工大学 地址310018浙江省杭州市下沙高教园区2 号大街928号 (72)发明人屠德展洪榛潘晓曼裴同豪 王瑞董峻魁 高学江 (74)专利代理机构绍兴市越兴专利事务所 33220 代理人蒋卫东 (51)Int.C1. G05D1/02(2006.01) G01N33/18(2006.01) 权利要求书2页说明书6页附图11页 (54)发明名称 一种面向大范围水质监测的仿生鱼协同控制 方法 (57)摘要 本发明涉及一种面向大范围水质监测的仿生 鱼协同控制方法,其采用多个移动节点编队控制 方式采集水质参数信息。领航仿生节点和跟随仿 生节点采用模仿金枪鱼外观设计。领航仿生节点 浮于水面区域巡游,以水声广播的方式告知水里 的跟随仿生节点队形信息,同时收集跟随仿生节 点采集的水质参数信息,并与岸上基站实现通信。 跟随仿生移动节点接收队形信息后以一定的几何 构型跟随领航仿生节点移动,并采集、发送水质参 数信息。领航与跟随仿生节点间采用水声通信技 术,领航仿生节点与岸上基站间采用GPRS通信技 术。编队系统采用分布式模糊编队控制方式,可以 实现远程控制,测试范围广,精度高,在线监测不 同水域的水质参数,有较好的应用前景。 F9909950 石