正在加载图片...
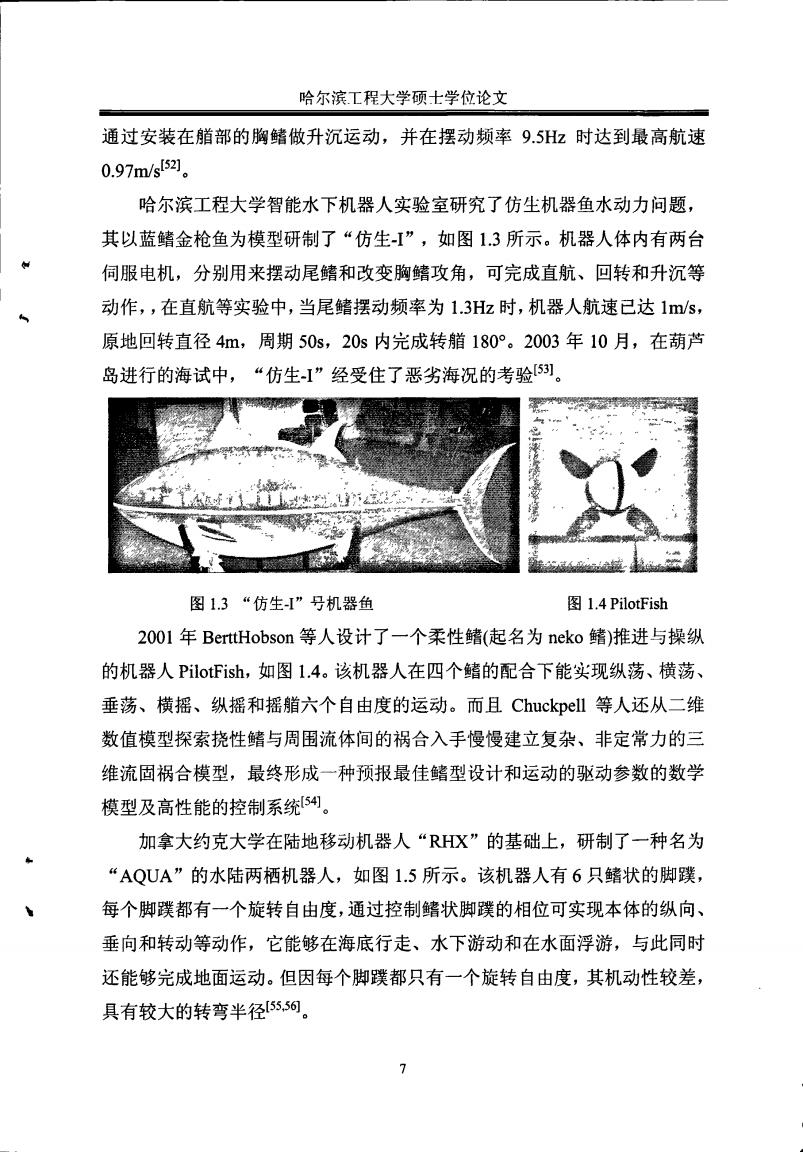
哈尔滨工程大学硕士学位论文 通过安装在艏部的胸鳍做升沉运动,并在摆动频率9.5Hz时达到最高航速 0.97m/s2。 哈尔滨工程大学智能水下机器人实验室研究了仿生机器鱼水动力问题, 其以蓝鳍金枪鱼为模型研制了“仿生I”,如图1.3所示。机器人体内有两台 伺服电机,分别用来摆动尾鳍和改变胸鳍攻角,可完成直航、回转和升沉等 动作,在直航等实验中,当尾鳍摆动频率为1.3Hz时,机器人航速已达1m/s, 原地回转直径4m,周期50s,20s内完成转艏180°。2003年10月,在葫芦 岛进行的海试中,“仿生I”经受住了恶劣海况的考验5) 图1.3“仿生I”号机器鱼 图1.4 PilotFish 2001年BerttHobson等人设计了一个柔性鳍(起名为neko鳍)推进与操纵 的机器人PilotFish,如图1.4。该机器人在四个鳍的配合下能实现纵荡、横荡、 垂荡、横摇、纵摇和摇艏六个自由度的运动。而且Chuckpell等人还从二维 数值模型探索挠性鳍与周围流体间的祸合入手慢慢建立复杂、非定常力的三 维流固祸合模型,最终形成一种预报最佳鳍型设计和运动的驱动参数的数学 模型及高性能的控制系统54。 加拿大约克大学在陆地移动机器人“RHX”的基础上,研制了一种名为 “AQUA”的水陆两栖机器人,如图1.5所示。该机器人有6只鳍状的脚蹼, 每个脚蹼都有一个旋转自由度,通过控制鳍状脚蹼的相位可实现本体的纵向、 垂向和转动等动作,它能够在海底行走、水下游动和在水面浮游,与此同时 还能够完成地面运动。但因每个脚蹼都只有一个旋转自由度,其机动性较差, 具有较大的转弯半径55,5。哈尔滨工程大学硕士学位论文 通过安装在艏部的胸鳍做升沉运动,并在摆动频率9.5Hz时达到最高航速 0.97m/s[521。 哈尔滨工程大学智能水下机器人实验室研究了仿生机器鱼水动力问题, 其以蓝鳍金枪鱼为模型研制了“仿生.I”,如图1.3所示。机器人体内有两台 伺服电机,分别用来摆动尾鳍和改变胸鳍攻角,可完成直航、回转和升沉等 动作,,在直航等实验中,当尾鳍摆动频率为1.3Hz时,机器人航速己达lm/s, 原地回转直径4m,周期50s,20s内完成转艏1800。2003年10月,在葫芦 岛进行的海试中, “仿生.I”经受住了恶劣海况的考验[53】。 图1.3“仿生-I”号机器鱼 图1.4 PilotFish 2001年BerttHobson等人设计了一个柔性鳍(起名为neko鳍)推进与操纵 的机器人PilotFish,如图1.4。该机器人在四个鳍的配合下能实现纵荡、横荡、 垂荡、横摇、纵摇和摇艏六个自由度的运动。而且Chuckpell等人还从二维 数值模型探索挠性鳍与周围流体间的祸合入手慢慢建立复杂、非定常力的三 维流固祸合模型,最终形成一种预报最佳鳍型设计和运动的驱动参数的数学 模型及高性能的控制系统[541。 加拿大约克大学在陆地移动机器人“RHX”的基础上,研制了一种名为 “AQUA”的水陆两栖机器人,如图1.5所示。该机器人有6只鳍状的脚蹼, 每个脚蹼都有一个旋转自由度,通过控制鳍状脚蹼的相位可实现本体的纵向、 垂向和转动等动作,它能够在海底行走、水下游动和在水面浮游,与此同时 还能够完成地面运动。但因每个脚蹼都只有一个旋转自由度,其机动性较差, 具有较大的转弯半径【55,56]