正在加载图片...
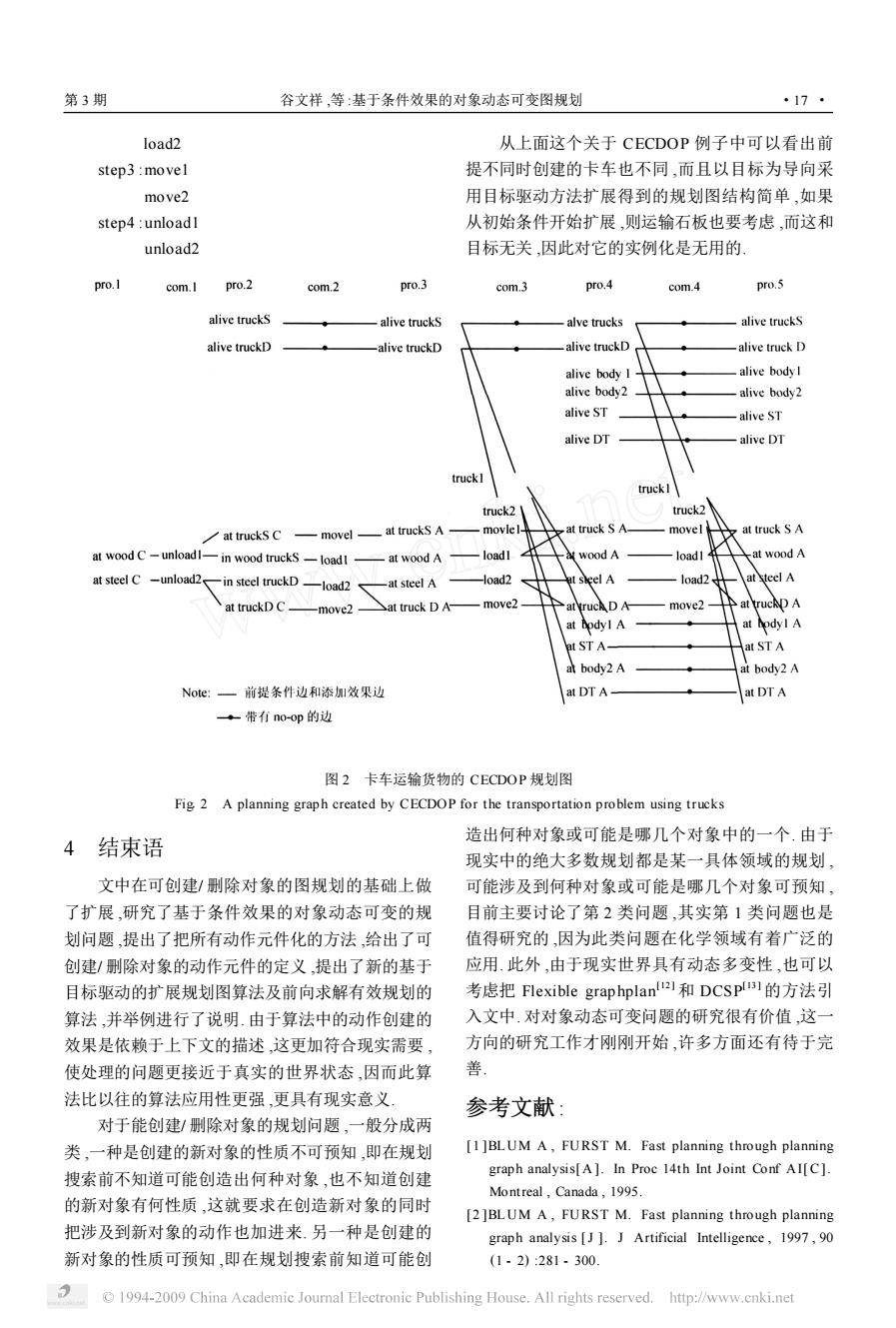
第3期 谷文祥,等:基于条件效果的对象动态可变图规划 ·17· load2 从上面这个关于CECDOP例子中可以看出前 step3 movel 提不同时创建的卡车也不同,而且以目标为导向采 move2 用目标驱动方法扩展得到的规划图结构简单,如果 step4 unloadI 从初始条件开始扩展,则运输石板也要考虑,而这和 unload2 目标无关,因此对它的实例化是无用的 pro.1 com.I pro.2 com.2 pro.3 com.3 pro.4 com.4 pro.5 alive truckS alive truckS alve trucks alive truckS alive truckD -alive truckD alive truckD alive truck D alive body I alive bodyl alive body2 alive body2 alive ST -alive ST alive DT 、 alive DT truckl truck2 truck2 at truckS C movel at truckS A -movlel at truck S A- movel at truck SA at wood C-unloadl-in wood truckS-loadl- -at wood A loadl wood A loadl at wood A at steel C -unload2. in steel truckD-load2 -at steel A -load2 at sheel A load2 at'steel A at truckD C_ -move2 at truck D A- move2- at truch D A move2 at truchD A at bodyl A at bodyl A at ST A- at ST A at body2 A at body2 A Note:一前提条件边和添加效果边 at DT A- at DTA ◆带有n0-0p的边 图2卡车运输货物的CECDOP规划图 Fig 2 A planning graph created by CECDOP for the transportation problem using trucks 4结束语 造出何种对象或可能是哪几个对象中的一个.由于 现实中的绝大多数规划都是某一具体领域的规划, 文中在可创建/删除对象的图规划的基础上做 可能涉及到何种对象或可能是哪几个对象可预知, 了扩展,研究了基于条件效果的对象动态可变的规 目前主要讨论了第2类问题,其实第1类问题也是 划问题,提出了把所有动作元件化的方法,给出了可 值得研究的,因为此类问题在化学领域有着广泛的 创建/删除对象的动作元件的定义,提出了新的基于 应用.此外,由于现实世界具有动态多变性,也可以 目标驱动的扩展规划图算法及前向求解有效规划的 考虑把Flexible graphplan2和DCSp1的方法引 算法,并举例进行了说明.由于算法中的动作创建的 入文中.对对象动态可变问题的研究很有价值,这一 效果是依赖于上下文的描述,这更加符合现实需要, 方向的研究工作才刚刚开始,许多方面还有待于完 使处理的问题更接近于真实的世界状态,因而此算 善 法比以往的算法应用性更强,更具有现实意义 参考文献: 对于能创建/删除对象的规划问题,一般分成两 类,一种是创建的新对象的性质不可预知,即在规划 [1]BLUM A,FURST M.Fast planning through planning 搜索前不知道可能创造出何种对象,也不知道创建 graph analysis[A].In Proc 14th Int Joint Conf AI[C]. Montreal,Canada,1995. 的新对象有何性质,这就要求在创造新对象的同时 [2]BLUM A,FURST M.Fast planning through planning 把涉及到新对象的动作也加进来.另一种是创建的 graph analysis [J].J Artificial Intelligence,1997,90 新对象的性质可预知,即在规划搜索前知道可能创 (1-2):281-300 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.netload2 step3 :move1 move2 step4 :unload1 unload2 从上面这个关于 CECDOP 例子中可以看出前 提不同时创建的卡车也不同 ,而且以目标为导向采 用目标驱动方法扩展得到的规划图结构简单 ,如果 从初始条件开始扩展 ,则运输石板也要考虑 ,而这和 目标无关 ,因此对它的实例化是无用的. 图 2 卡车运输货物的 CECDOP 规划图 Fig12 A planning graph created by CECDOP for the transportation problem using trucks 4 结束语 文中在可创建/ 删除对象的图规划的基础上做 了扩展 ,研究了基于条件效果的对象动态可变的规 划问题 ,提出了把所有动作元件化的方法 ,给出了可 创建/ 删除对象的动作元件的定义 ,提出了新的基于 目标驱动的扩展规划图算法及前向求解有效规划的 算法 ,并举例进行了说明. 由于算法中的动作创建的 效果是依赖于上下文的描述 ,这更加符合现实需要 , 使处理的问题更接近于真实的世界状态 ,因而此算 法比以往的算法应用性更强 ,更具有现实意义. 对于能创建/ 删除对象的规划问题 ,一般分成两 类 ,一种是创建的新对象的性质不可预知 ,即在规划 搜索前不知道可能创造出何种对象 ,也不知道创建 的新对象有何性质 ,这就要求在创造新对象的同时 把涉及到新对象的动作也加进来. 另一种是创建的 新对象的性质可预知 ,即在规划搜索前知道可能创 造出何种对象或可能是哪几个对象中的一个. 由于 现实中的绝大多数规划都是某一具体领域的规划 , 可能涉及到何种对象或可能是哪几个对象可预知 , 目前主要讨论了第 2 类问题 ,其实第 1 类问题也是 值得研究的 ,因为此类问题在化学领域有着广泛的 应用. 此外 ,由于现实世界具有动态多变性 ,也可以 考虑把 Flexible grap hplan [12 ] 和 DCSP [13 ] 的方法引 入文中. 对对象动态可变问题的研究很有价值 ,这一 方向的研究工作才刚刚开始 ,许多方面还有待于完 善. 参考文献 : [1 ]BLUM A , FURST M. Fast planning through planning graph analysis[ A ]. In Proc 14th Int Joint Conf AI[ C]. Montreal , Canada , 1995. [2 ]BLUM A , FURST M. Fast planning through planning graph analysis [J ]. J Artificial Intelligence , 1997 , 90 (1 - 2) :281 - 300. 第 3 期 谷文祥 ,等 :基于条件效果的对象动态可变图规划 ·17 ·