正在加载图片...
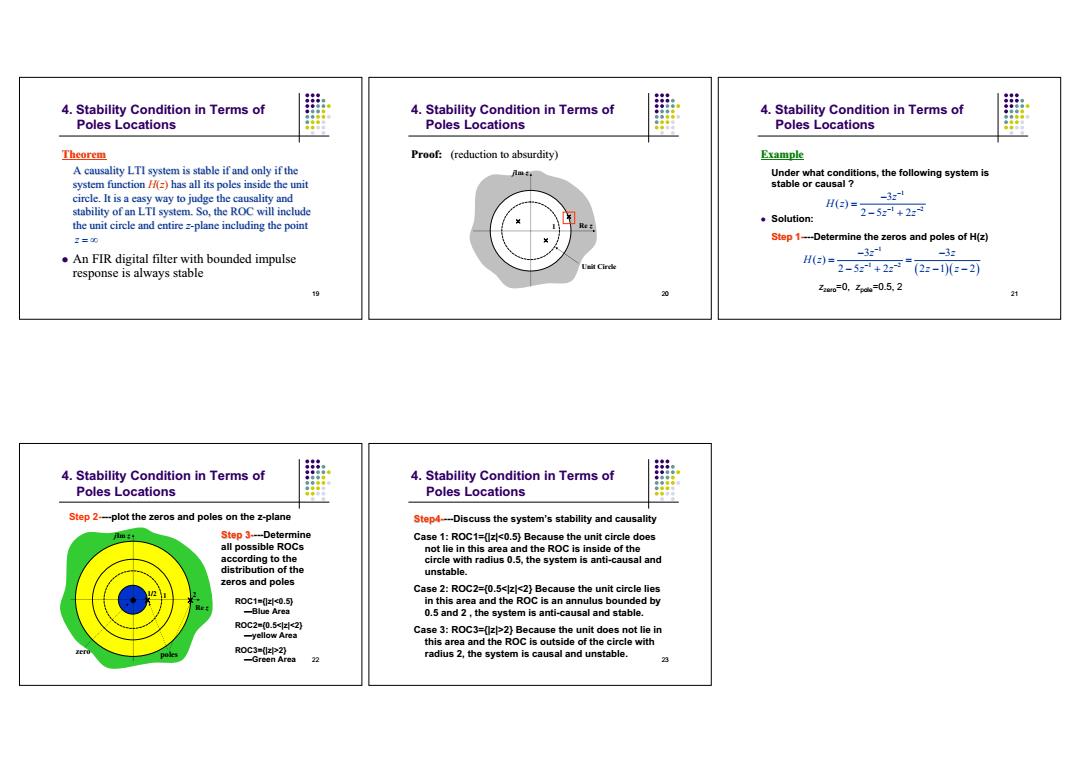
4.Stability Condition in Terms of 4.Stability Condition in Terms of 4.Stability Condition in Terms of Poles Locations Poles Locations Poles Locations Theorer里 Proof:(reduction to absurdity) Exampl业e A causality LTI system is stable if and only if the Under what conditions,the following system is system function //z)has all its poles inside the unit stable or causal circle.It is a easy way to judge the causality and -3这 H(z)= stability of an LTI system.So,the ROC will include ◆Solution: 2-5z1+2z☒ the unit circle and entire z-plane including the point =0 Step 1---Determine the zeros and poles of H(z) An FIR digital filter with bounded impulse -31 -3z UCirw response is always stable H2)=2-5+222z-102-2可 19 2zeo-0,Za=0.5n2 21 4.Stability Condition in Terms of 4.Stability Condition in Terms of Poles Locations Poles Locations Step 2--plot the zeros and poles on the z-plane Step4----Discuss the system's stability and causality Step 3----Determine Case 1:ROC1=(lz<0.5)Because the unit circle does all possible ROCs not lie in this area and the ROC is inside of the according to the circle with radius 0.5,the system is anti-causal and distribution of the unstable. zeros and poles Case 2:ROC2=(0.5<z<2)Because the unit circle lies R0C1=0<0.5司 in this area and the ROC is an annulus bounded by -Blue Area 0.5 and 2,the system is anti-causal and stable. R0C2-0.5<2 -yellow Area Case 3:ROC3=(z>2)Because the unit does not lie in this area and the ROC is outside of the circle with R0C3-0中2☑ -Green Area 22 radius 2,the system is causal and unstable.19 4. Stability Condition in Terms of Poles Locations Theorem A causality LTI system is stable if and only if the A causality LTI system is stable if and only if the system function system function H(z) has all its poles inside the unit has all its poles inside the unit circle. It is a easy way to judge the causality and circle. It is a easy way to judge the causality and stability of an LTI system. So, the ROC will include stability of an LTI system. So, the ROC will include the unit circle and entire z-plane including the point plane including the point An FIR digital filter with bounded impulse response is always stable z 20 4. Stability Condition in Terms of Poles Locations Proof: (reduction to absurdity) 1 Re z jIm z h h h Unit Circle 21 4. Stability Condition in Terms of Poles Locations Example Under what conditions, the following system is stable or causal ? Solution: Step 1----Determine the zeros and poles of H(z) 1 1 2 3 ( ) 25 2 z H z z z 1 1 2 3 3 ( ) 25 2 2 1 2 z z H z zz zz zzero=0, zpole=0.5, 2 22 4. Stability Condition in Terms of Poles Locations Step 2----plot the zeros and poles on the z-plane ROC1={|z|<0.5} —Blue Area ROC2={0.5<|z|<2} —yellow Area ROC3={|z|>2} —Green Area 1 Re z jIm z 1/2 2 h h zero poles Step 3----Determine all possible ROCs according to the distribution of the zeros and poles 23 4. Stability Condition in Terms of Poles Locations Step4----Discuss the system’s stability and causality Case 1: ROC1={|z|<0.5} Because the unit circle does not lie in this area and the ROC is inside of the circle with radius 0.5, the system is anti-causal and unstable. Case 2: ROC2={0.5<|z|<2} Because the unit circle lies in this area and the ROC is an annulus bounded by 0.5 and 2 , the system is anti-causal and stable. Case 3: ROC3={|z|>2} Because the unit does not lie in this area and the ROC is outside of the circle with radius 2, the system is causal and unstable.���