正在加载图片...
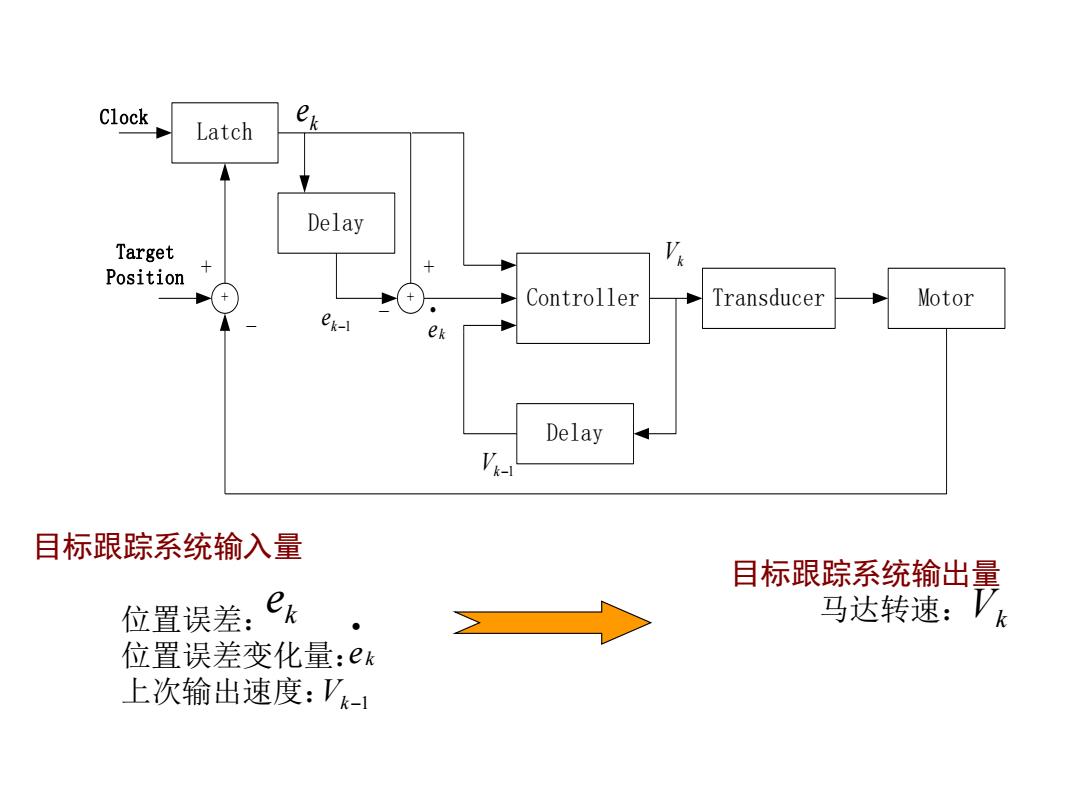
Clock Latch Delay Target Position Controller Transducer Motor ek Delay V 目标跟踪系统输入量 目标跟踪系统输出量 位置误差:ek 马达转速:Vk 位置误差变化量:ek 上次输出速度:Vk-目标跟踪系统输入量 位置误差: 位置误差变化量: 上次输出速度: 目标跟踪系统输出量 e k 马达转速: e k • Vk − 1 Vk Latch Delay Controller Delay + + Transducer Motor Clock Target Position + - k e ek • Vk−1 Vk k−1 e + -